 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoT-VLM4Tar: Chain-of-Thought Guided Vision-Language Models for Traffic Anomaly Resolution
Mar 03, 2025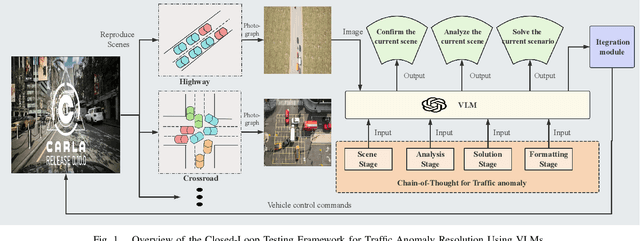
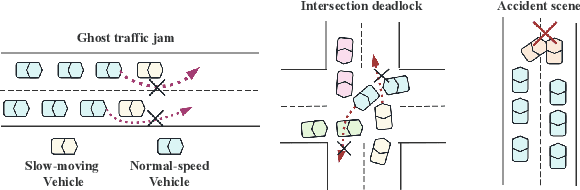
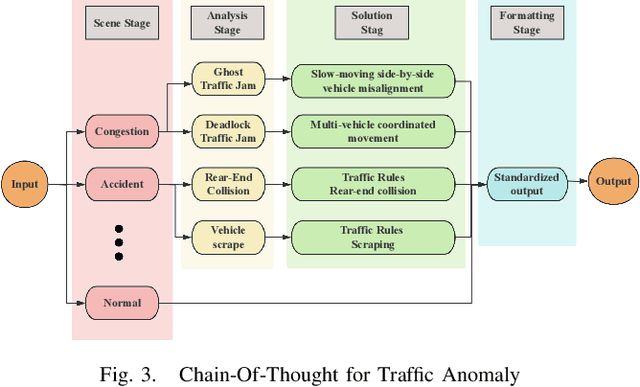
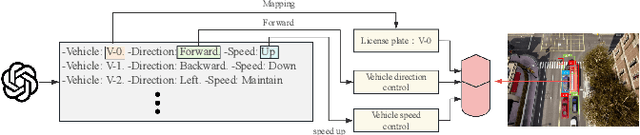
With the acceleration of urbanization, modern urban traffic systems are becoming increasingly complex, leading to frequent traffic anomalies. These anomalies encompass not only common traffic jams but also more challenging issues such as phantom traffic jams, intersection deadlocks, and accident liability analysis, which severely impact traffic flow, vehicular safety, and overall transportation efficiency. Currently, existing solutions primarily rely on manual intervention by traffic police or artificial intelligence-based detection systems. However, these methods often suffer from response delays and inconsistent management due to inadequate resources, while AI detection systems, despite enhancing efficiency to some extent, still struggle to handle complex traffic anomalies in a real-time and precise manner. To address these issues, we propose CoT-VLM4Tar: (Chain of Thought Visual-Language Model for Traffic Anomaly Resolution), this innovative approach introduces a new chain-of-thought to guide the VLM in analyzing, reasoning, and generating solutions for traffic anomalies with greater reasonable and effective solution, and to evaluate the performance and effectiveness of our method, we developed a closed-loop testing framework based on the CARLA simulator. Furthermore, to ensure seamless integration of the solutions generated by the VLM with the CARLA simulator, we implement an itegration module that converts these solutions into executable commands. Our results demonstrate the effectiveness of VLM in the resolution of real-time traffic anomalies, providing a proof-of-concept for its integration into autonomous traffic management systems.
Autoware.Flex: Human-Instructed Dynamically Reconfigurable Autonomous Driving Systems
Dec 20, 2024Existing Autonomous Driving Systems (ADS) independently make driving decisions, but they face two significant limitations. First, in complex scenarios, ADS may misinterpret the environment and make inappropriate driving decisions. Second, these systems are unable to incorporate human driving preferences in their decision-making processes. This paper proposes Autoware.Flex, a novel ADS system that incorporates human input into the driving process, allowing users to guide the ADS in making more appropriate decisions and ensuring their preferences are satisfied. Achieving this needs to address two key challenges: (1) translating human instructions, expressed in natural language, into a format the ADS can understand, and (2) ensuring these instructions are executed safely and consistently within the ADS' s decision-making framework. For the first challenge, we employ a Large Language Model (LLM) assisted by an ADS-specialized knowledge base to enhance domain-specific translation. For the second challenge, we design a validation mechanism to ensure that human instructions result in safe and consistent driving behavior. Experiments conducted on both simulators and a real-world autonomous vehicle demonstrate that Autoware.Flex effectively interprets human instructions and executes them safely.
Hierarchical Multi-Agent Multi-Armed Bandit for Resource Allocation in Multi-LEO Satellite Constellation Networks
Mar 25, 2023Low Earth orbit (LEO) satellite constellation is capable of providing global coverage area with high-rate services in the next sixth-generation (6G) non-terrestrial network (NTN). Due to limited onboard resources of operating power, beams, and channels, resilient and efficient resource management has become compellingly imperative under complex interference cases. However, different from conventional terrestrial base stations, LEO is deployed at considerable height and under high mobility, inducing substantially long delay and interference during transmission. As a result, acquiring the accurate channel state information between LEOs and ground users is challenging. Therefore, we construct a framework with a two-way transmission under unknown channel information and no data collected at long-delay ground gateway. In this paper, we propose hierarchical multi-agent multi-armed bandit resource allocation for LEO constellation (mmRAL) by appropriately assigning available radio resources. LEOs are considered as collaborative multiple macro-agents attempting unknown trials of various actions of micro-agents of respective resources, asymptotically achieving suitable allocation with only throughput information. In simulations, we evaluate mmRAL in various cases of LEO deployment, serving numbers of users and LEOs, hardware cost and outage probability. Benefited by efficient and resilient allocation, the proposed mmRAL system is capable of operating in homogeneous or heterogeneous orbital planes or constellations, achieving the highest throughput performance compared to the existing benchmarks in open literature.
Edge Selection and Clustering for Federated Learning in Optical Inter-LEO Satellite Constellation
Mar 25, 2023Low-Earth orbit (LEO) satellites have been prosperously deployed for various Earth observation missions due to its capability of collecting a large amount of image or sensor data. However, traditionally, the data training process is performed in the terrestrial cloud server, which leads to a high transmission overhead. With the recent development of LEO, it is more imperative to provide ultra-dense LEO constellation with enhanced on-board computation capability. Benefited from it, we have proposed a collaborative federated learning over LEO satellite constellation (FedLEO). We allocate the entire process on LEOs with low payload inter-satellite transmissions, whilst the low-delay terrestrial gateway server (GS) only takes care for initial signal controlling. The GS initially selects an LEO server, whereas its LEO clients are all determined by clustering mechanism and communication capability through the optical inter-satellite links (ISLs). The re-clustering of changing LEO server will be executed once with low communication quality of FedLEO. In the simulations, we have numerically analyzed the proposed FedLEO under practical Walker-based LEO constellation configurations along with MNIST training dataset for classification mission. The proposed FedLEO outperforms the conventional centralized and distributed architectures with higher classification accuracy as well as comparably lower latency of joint communication and computing.
First Arrival Position in Molecular Communication Via Generator of Diffusion Semigroup
Jan 14, 2022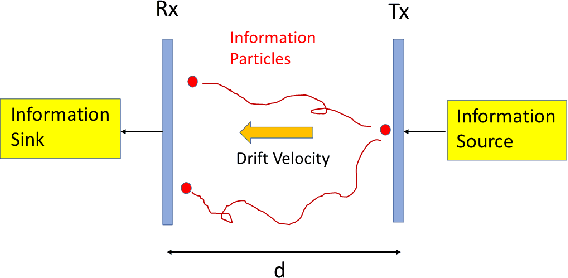
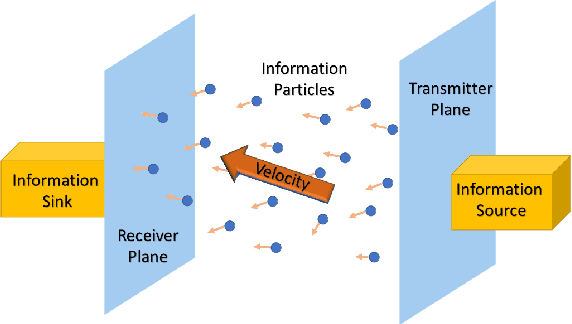
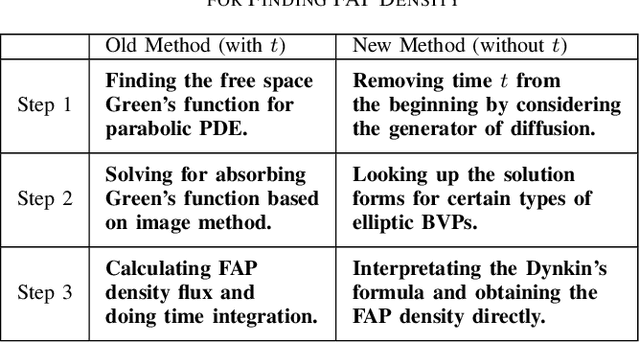
We consider the problem of characterizing the first arrival position (FAP) density in molecular communication (MC) with a diffusion-advection channel that permits a constant drift velocity pointed to arbitrary direction. The advantage of FAP modulation lies in the fact that it could encode more information into higher dimensional spatial variables, compared to other modulation techniques using time or molecule numbers. However, effective methods to characterize the FAP density in a general framework do not exist. In this paper, we devise a methodology that fully resolves the FAP density with planar absorbing receivers in arbitrary dimensions. Our work recovers existing results of FAP in 2D and 3D as special cases. The key insight of our approach is to remove the time dependence of the MC system evolution based on the generator of diffusion semigroups.