 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoware.Flex: Human-Instructed Dynamically Reconfigurable Autonomous Driving Systems
Dec 20, 2024Existing Autonomous Driving Systems (ADS) independently make driving decisions, but they face two significant limitations. First, in complex scenarios, ADS may misinterpret the environment and make inappropriate driving decisions. Second, these systems are unable to incorporate human driving preferences in their decision-making processes. This paper proposes Autoware.Flex, a novel ADS system that incorporates human input into the driving process, allowing users to guide the ADS in making more appropriate decisions and ensuring their preferences are satisfied. Achieving this needs to address two key challenges: (1) translating human instructions, expressed in natural language, into a format the ADS can understand, and (2) ensuring these instructions are executed safely and consistently within the ADS' s decision-making framework. For the first challenge, we employ a Large Language Model (LLM) assisted by an ADS-specialized knowledge base to enhance domain-specific translation. For the second challenge, we design a validation mechanism to ensure that human instructions result in safe and consistent driving behavior. Experiments conducted on both simulators and a real-world autonomous vehicle demonstrate that Autoware.Flex effectively interprets human instructions and executes them safely.
Adversarial attacks on an optical neural network
Apr 29, 2022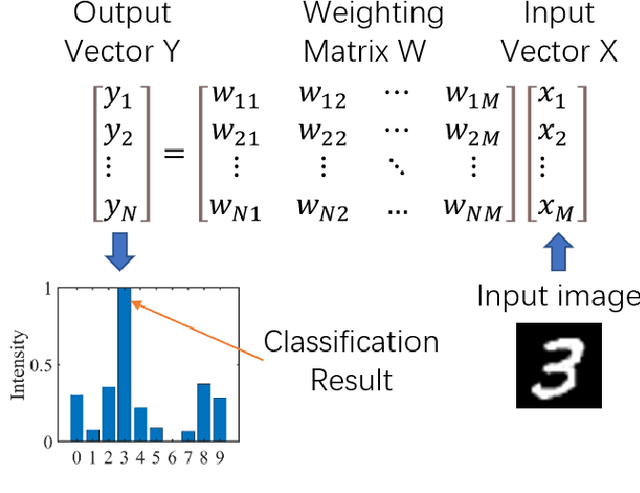
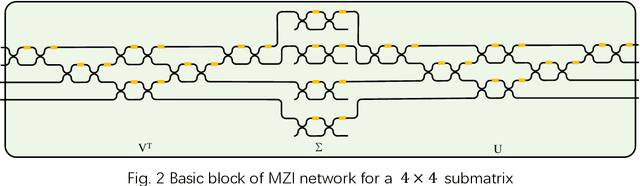
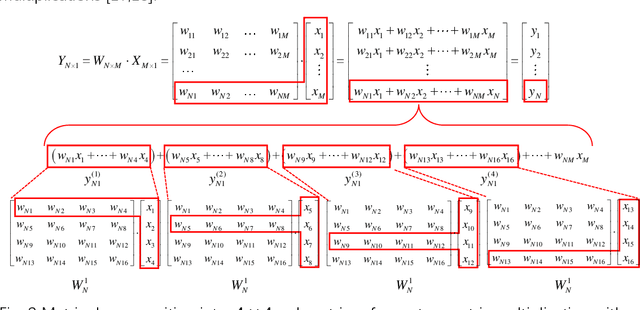
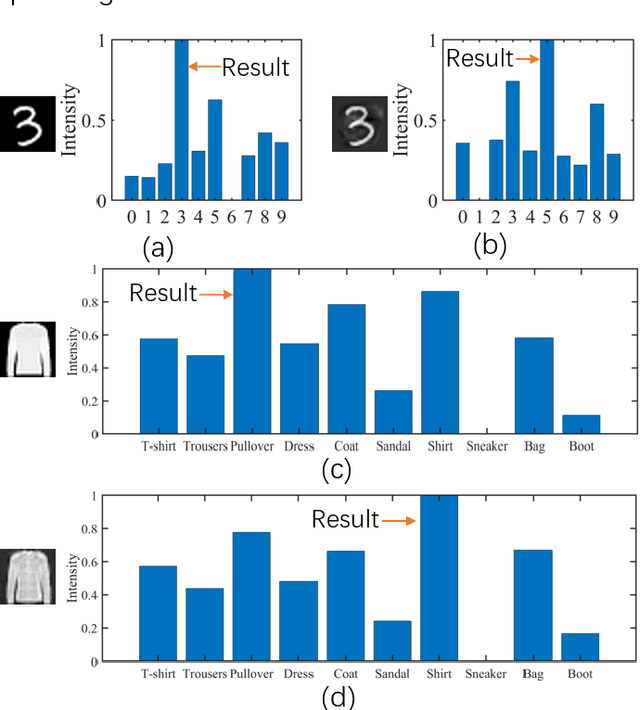
Adversarial attacks have been extensively investigated for machine learning systems including deep learning in the digital domain. However, the adversarial attacks on optical neural networks (ONN) have been seldom considered previously. In this work, we first construct an accurate image classifier with an ONN using a mesh of interconnected Mach-Zehnder interferometers (MZI). Then a corresponding adversarial attack scheme is proposed for the first time. The attacked images are visually very similar to the original ones but the ONN system becomes malfunctioned and generates wrong classification results in most time. The results indicate that adversarial attack is also a significant issue for optical machine learning systems.