 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Machine Learning Method for Predicting Traffic Signal Timing from Probe Vehicle Data
Aug 04, 2023



Traffic signals play an important role in transportation by enabling traffic flow management, and ensuring safety at intersections. In addition, knowing the traffic signal phase and timing data can allow optimal vehicle routing for time and energy efficiency, eco-driving, and the accurate simulation of signalized road networks. In this paper, we present a machine learning (ML) method for estimating traffic signal timing information from vehicle probe data. To the authors best knowledge, very few works have presented ML techniques for determining traffic signal timing parameters from vehicle probe data. In this work, we develop an Extreme Gradient Boosting (XGBoost) model to estimate signal cycle lengths and a neural network model to determine the corresponding red times per phase from probe data. The green times are then be derived from the cycle length and red times. Our results show an error of less than 0.56 sec for cycle length, and red times predictions within 7.2 sec error on average.
Attention-based Spatial-Temporal Graph Neural ODE for Traffic Prediction
May 01, 2023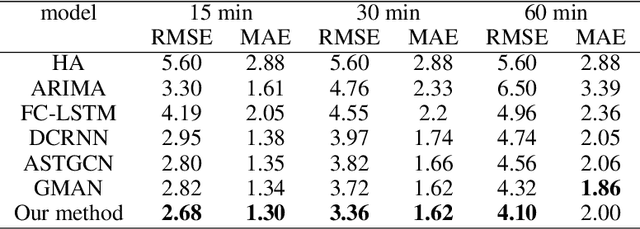
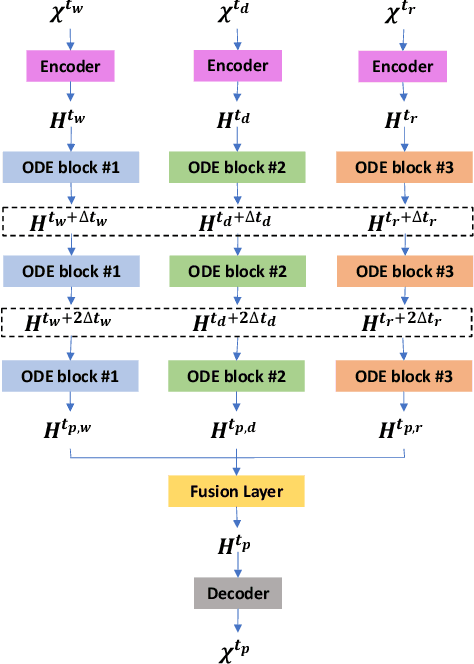
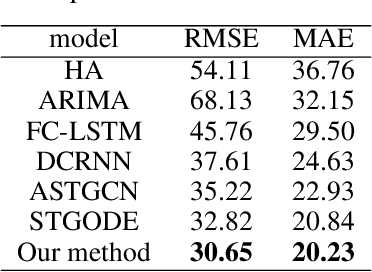
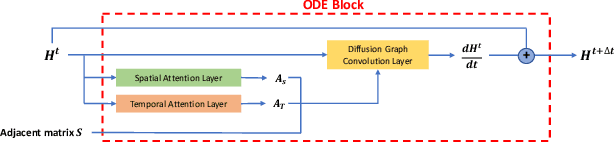
Traffic forecasting is an important issue in intelligent traffic systems (ITS). Graph neural networks (GNNs) are effective deep learning models to capture the complex spatio-temporal dependency of traffic data, achieving ideal prediction performance. In this paper, we propose attention-based graph neural ODE (ASTGODE) that explicitly learns the dynamics of the traffic system, which makes the prediction of our machine learning model more explainable. Our model aggregates traffic patterns of different periods and has satisfactory performance on two real-world traffic data sets. The results show that our model achieves the highest accuracy of the root mean square error metric among all the existing GNN models in our experiments.
HumanLight: Incentivizing Ridesharing via Human-centric Deep Reinforcement Learning in Traffic Signal Control
Apr 05, 2023Single occupancy vehicles are the most attractive transportation alternative for many commuters, leading to increased traffic congestion and air pollution. Advancements in information technologies create opportunities for smart solutions that incentivize ridesharing and mode shift to higher occupancy vehicles (HOVs) to achieve the car lighter vision of cities. In this study, we present HumanLight, a novel decentralized adaptive traffic signal control algorithm designed to optimize people throughput at intersections. Our proposed controller is founded on reinforcement learning with the reward function embedding the transportation-inspired concept of pressure at the person-level. By rewarding HOV commuters with travel time savings for their efforts to merge into a single ride, HumanLight achieves equitable allocation of green times. Apart from adopting FRAP, a state-of-the-art (SOTA) base model, HumanLight introduces the concept of active vehicles, loosely defined as vehicles in proximity to the intersection within the action interval window. The proposed algorithm showcases significant headroom and scalability in different network configurations considering multimodal vehicle splits at various scenarios of HOV adoption. Improvements in person delays and queues range from 15% to over 55% compared to vehicle-level SOTA controllers. We quantify the impact of incorporating active vehicles in the formulation of our RL model for different network structures. HumanLight also enables regulation of the aggressiveness of the HOV prioritization. The impact of parameter setting on the generated phase profile is investigated as a key component of acyclic signal controllers affecting pedestrian waiting times. HumanLight's scalable, decentralized design can reshape the resolution of traffic management to be more human-centric and empower policies that incentivize ridesharing and public transit systems.
Explainable Graph Pyramid Autoformer for Long-Term Traffic Forecasting
Sep 27, 2022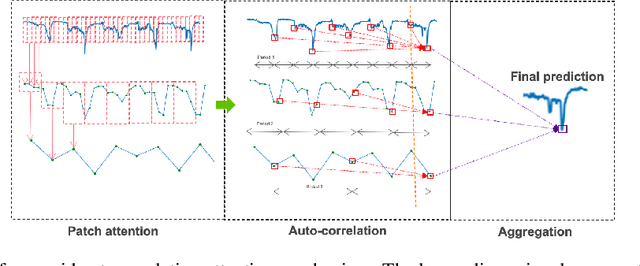
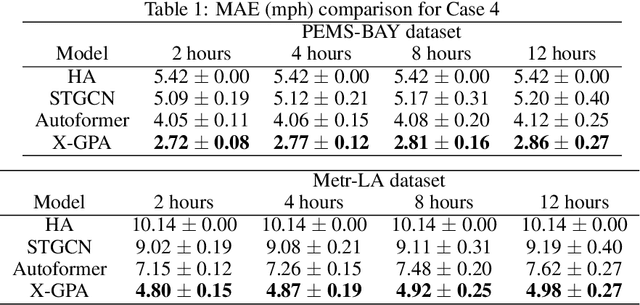
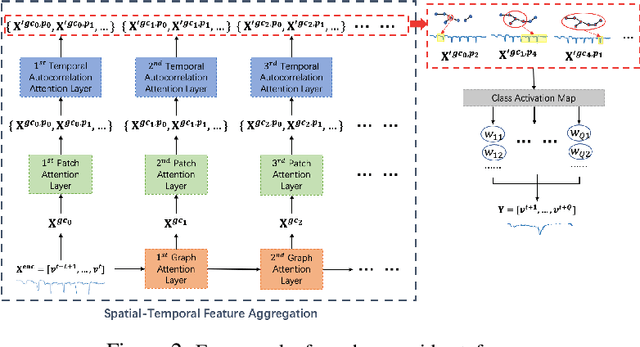
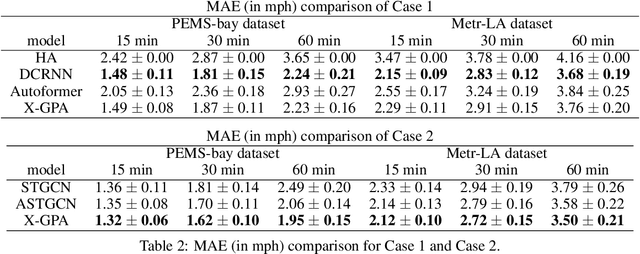
Accurate traffic forecasting is vital to an intelligent transportation system. Although many deep learning models have achieved state-of-art performance for short-term traffic forecasting of up to 1 hour, long-term traffic forecasting that spans multiple hours remains a major challenge. Moreover, most of the existing deep learning traffic forecasting models are black box, presenting additional challenges related to explainability and interpretability. We develop Graph Pyramid Autoformer (X-GPA), an explainable attention-based spatial-temporal graph neural network that uses a novel pyramid autocorrelation attention mechanism. It enables learning from long temporal sequences on graphs and improves long-term traffic forecasting accuracy. Our model can achieve up to 35 % better long-term traffic forecast accuracy than that of several state-of-the-art methods. The attention-based scores from the X-GPA model provide spatial and temporal explanations based on the traffic dynamics, which change for normal vs. peak-hour traffic and weekday vs. weekend traffic.
Deep-Ensemble-Based Uncertainty Quantification in Spatiotemporal Graph Neural Networks for Traffic Forecasting
Apr 05, 2022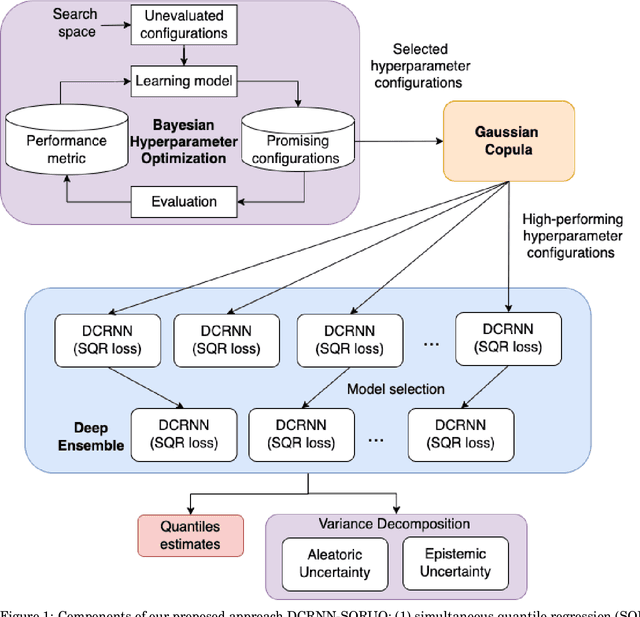
Deep-learning-based data-driven forecasting methods have produced impressive results for traffic forecasting. A major limitation of these methods, however, is that they provide forecasts without estimates of uncertainty, which are critical for real-time deployments. We focus on a diffusion convolutional recurrent neural network (DCRNN), a state-of-the-art method for short-term traffic forecasting. We develop a scalable deep ensemble approach to quantify uncertainties for DCRNN. Our approach uses a scalable Bayesian optimization method to perform hyperparameter optimization, selects a set of high-performing configurations, fits a generative model to capture the joint distributions of the hyperparameter configurations, and trains an ensemble of models by sampling a new set of hyperparameter configurations from the generative model. We demonstrate the efficacy of the proposed methods by comparing them with other uncertainty estimation techniques. We show that our generic and scalable approach outperforms the current state-of-the-art Bayesian and a number of other commonly used frequentist techniques.
A data-centric weak supervised learning for highway traffic incident detection
Dec 17, 2021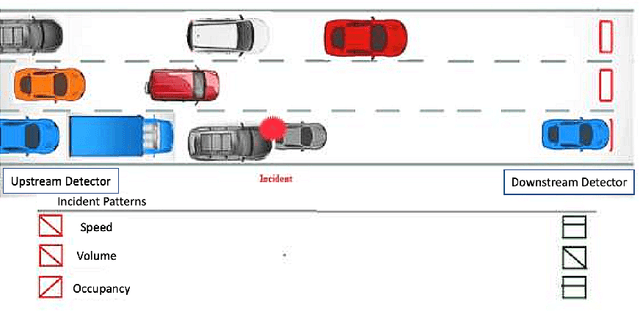
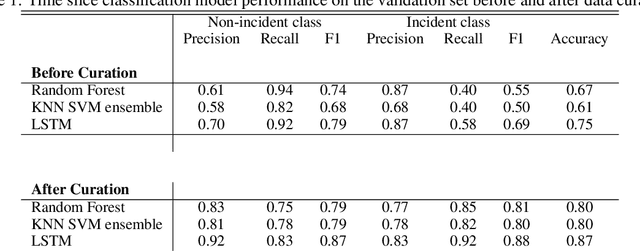
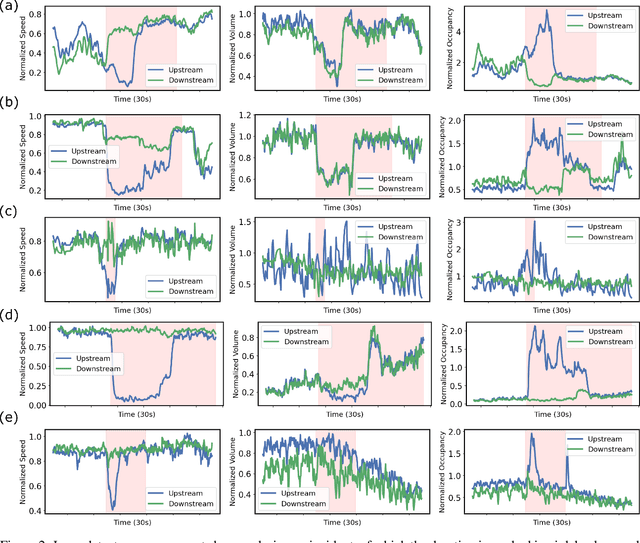
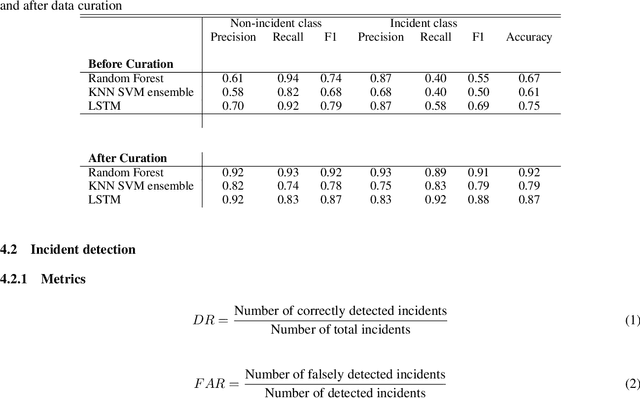
Using the data from loop detector sensors for near-real-time detection of traffic incidents in highways is crucial to averting major traffic congestion. While recent supervised machine learning methods offer solutions to incident detection by leveraging human-labeled incident data, the false alarm rate is often too high to be used in practice. Specifically, the inconsistency in the human labeling of the incidents significantly affects the performance of supervised learning models. To that end, we focus on a data-centric approach to improve the accuracy and reduce the false alarm rate of traffic incident detection on highways. We develop a weak supervised learning workflow to generate high-quality training labels for the incident data without the ground truth labels, and we use those generated labels in the supervised learning setup for final detection. This approach comprises three stages. First, we introduce a data preprocessing and curation pipeline that processes traffic sensor data to generate high-quality training data through leveraging labeling functions, which can be domain knowledge-related or simple heuristic rules. Second, we evaluate the training data generated by weak supervision using three supervised learning models -- random forest, k-nearest neighbors, and a support vector machine ensemble -- and long short-term memory classifiers. The results show that the accuracy of all of the models improves significantly after using the training data generated by weak supervision. Third, we develop an online real-time incident detection approach that leverages the model ensemble and the uncertainty quantification while detecting incidents. Overall, we show that our proposed weak supervised learning workflow achieves a high incident detection rate (0.90) and low false alarm rate (0.08).
Transfer Learning with Graph Neural Networks for Short-Term Highway Traffic Forecasting
Apr 20, 2020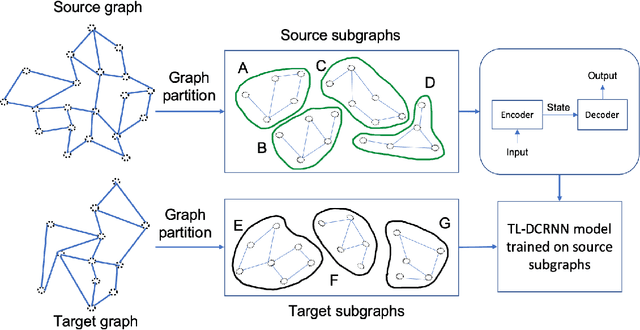
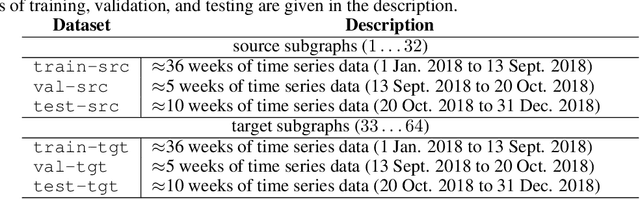
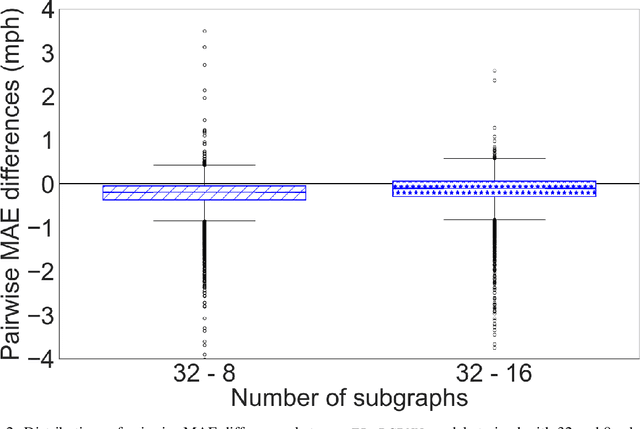
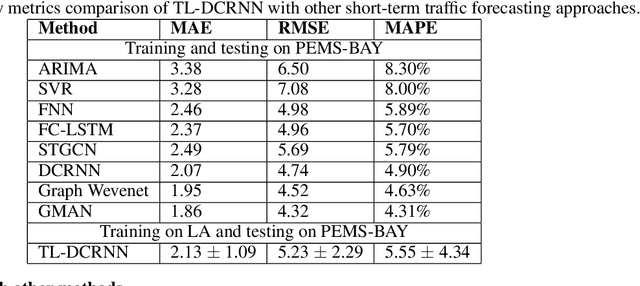
Highway traffic modeling and forecasting approaches are critical for intelligent transportation systems. Recently, deep-learning-based traffic forecasting methods have emerged as state of the art for a wide range of traffic forecasting tasks. However, these methods require a large amount of training data, which needs to be collected over a significant period of time. This can present a number of challenges for the development and deployment of data-driven learning methods for highway networks that suffer from lack of historical data. A promising approach to address this issue is transfer learning, where a model trained on one part of the highway network can be adapted for a different part of the highway network. We focus on diffusion convolutional recurrent neural network (DCRNN), a state-of-the-art graph neural network for highway network forecasting. It models the complex spatial and temporal dynamics of the highway network using a graph-based diffusion convolution operation within a recurrent neural network. DCRNN cannot perform transfer learning, however, because it learns location-specific traffic patterns, which cannot be used for unseen regions of the network. To that end, we develop a new transfer learning approach for DCRNN, where a single model trained on data-rich regions of the highway network can be used to forecast traffic on unseen regions of the highway network. We evaluate the ability of our approach to forecast the traffic on the entire California highway network with one year of time series data. We show that TL-DCRNN can learn from several regions of the California highway network and forecast the traffic on the unseen regions of the network with high accuracy. Moreover, we demonstrate that TL-DCRNN can learn from San Francisco region traffic data and can forecast traffic on the Los Angeles region and vice versa.
Graph-Partitioning-Based Diffusion Convolution Recurrent Neural Network for Large-Scale Traffic Forecasting
Oct 01, 2019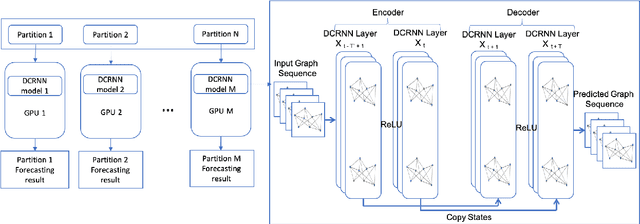
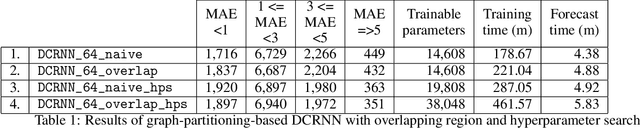
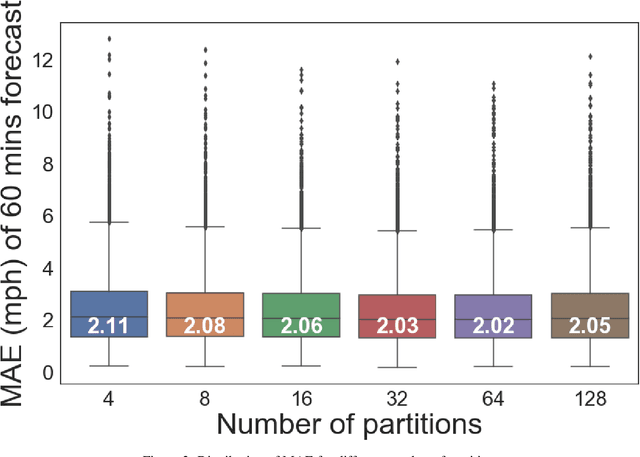
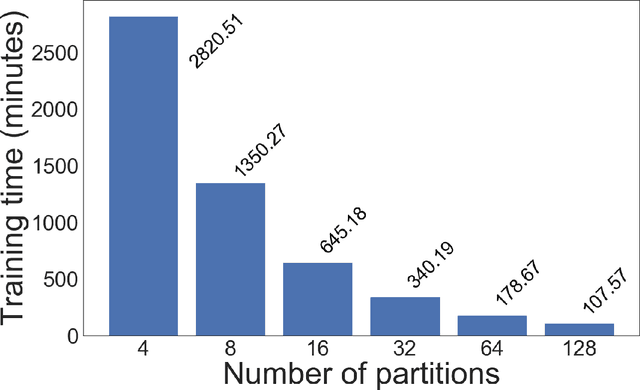
Traffic forecasting approaches are critical to developing adaptive strategies for mobility. Traffic patterns have complex spatial and temporal dependencies that make accurate forecasting on large highway networks a challenging task. Recently, diffusion convolutional recurrent neural networks (DCRNNs) have achieved state-of-the-art results in traffic forecasting by capturing the spatiotemporal dynamics of the traffic. Despite the promising results, adopting DCRNN for large highway networks still remains elusive because of computational and memory bottlenecks. We present an approach to apply DCRNN for a large highway network. We use a graph-partitioning approach to decompose a large highway network into smaller networks and train them simultaneously on a cluster with graphics processing units (GPU). For the first time, we forecast the traffic of the entire California highway network with 11,160 traffic sensor locations simultaneously. We show that our approach can be trained within 3 hours of wall-clock time using 64 GPUs to forecast speed with high accuracy. Further improvements in the accuracy are attained by including overlapping sensor locations from nearby partitions and finding high-performing hyperparameter configurations for the DCRNN using DeepHyper, a hyperparameter tuning package. We demonstrate that a single DCRNN model can be used to train and forecast the speed and flow simultaneously and the results preserve fundamental traffic flow dynamics. We expect our approach for modeling a large highway network in short wall-clock time as a potential core capability in advanced highway traffic monitoring systems, where forecasts can be used to adjust traffic management strategies proactively given anticipated future conditions.