 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-Partitioning-Based Diffusion Convolution Recurrent Neural Network for Large-Scale Traffic Forecasting
Paper and Code
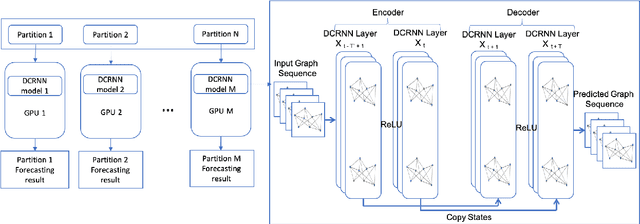
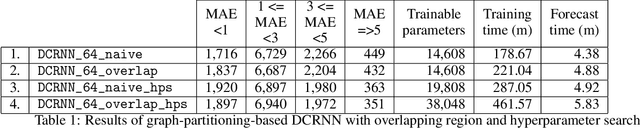
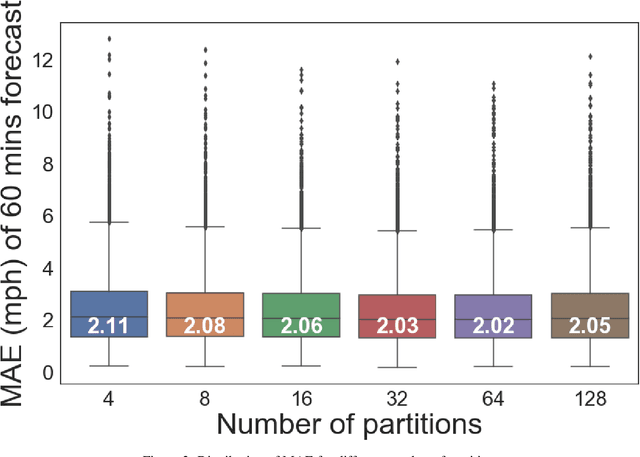
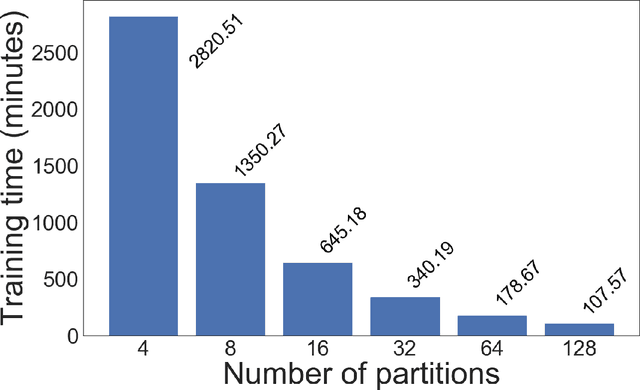
Traffic forecasting approaches are critical to developing adaptive strategies for mobility. Traffic patterns have complex spatial and temporal dependencies that make accurate forecasting on large highway networks a challenging task. Recently, diffusion convolutional recurrent neural networks (DCRNNs) have achieved state-of-the-art results in traffic forecasting by capturing the spatiotemporal dynamics of the traffic. Despite the promising results, adopting DCRNN for large highway networks still remains elusive because of computational and memory bottlenecks. We present an approach to apply DCRNN for a large highway network. We use a graph-partitioning approach to decompose a large highway network into smaller networks and train them simultaneously on a cluster with graphics processing units (GPU). For the first time, we forecast the traffic of the entire California highway network with 11,160 traffic sensor locations simultaneously. We show that our approach can be trained within 3 hours of wall-clock time using 64 GPUs to forecast speed with high accuracy. Further improvements in the accuracy are attained by including overlapping sensor locations from nearby partitions and finding high-performing hyperparameter configurations for the DCRNN using DeepHyper, a hyperparameter tuning package. We demonstrate that a single DCRNN model can be used to train and forecast the speed and flow simultaneously and the results preserve fundamental traffic flow dynamics. We expect our approach for modeling a large highway network in short wall-clock time as a potential core capability in advanced highway traffic monitoring systems, where forecasts can be used to adjust traffic management strategies proactively given anticipated future conditions.