 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePit30M: A Benchmark for Global Localization in the Age of Self-Driving Cars
Dec 23, 2020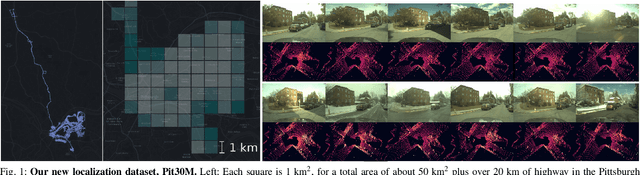
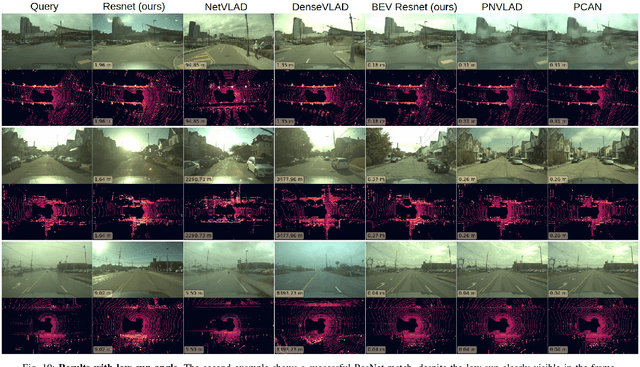
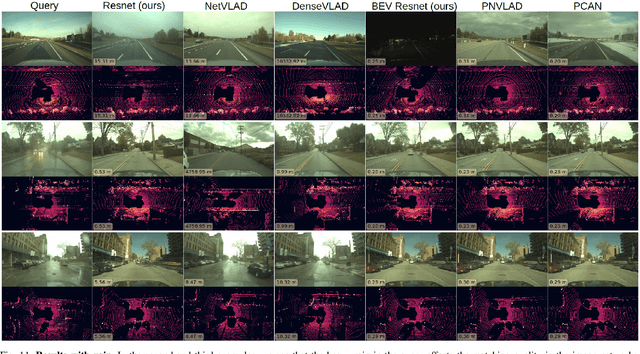

We are interested in understanding whether retrieval-based localization approaches are good enough in the context of self-driving vehicles. Towards this goal, we introduce Pit30M, a new image and LiDAR dataset with over 30 million frames, which is 10 to 100 times larger than those used in previous work. Pit30M is captured under diverse conditions (i.e., season, weather, time of the day, traffic), and provides accurate localization ground truth. We also automatically annotate our dataset with historical weather and astronomical data, as well as with image and LiDAR semantic segmentation as a proxy measure for occlusion. We benchmark multiple existing methods for image and LiDAR retrieval and, in the process, introduce a simple, yet effective convolutional network-based LiDAR retrieval method that is competitive with the state of the art. Our work provides, for the first time, a benchmark for sub-metre retrieval-based localization at city scale. The dataset, additional experimental results, as well as more information about the sensors, calibration, and metadata, are available on the project website: https://uber.com/atg/datasets/pit30m
DAGMapper: Learning to Map by Discovering Lane Topology
Dec 22, 2020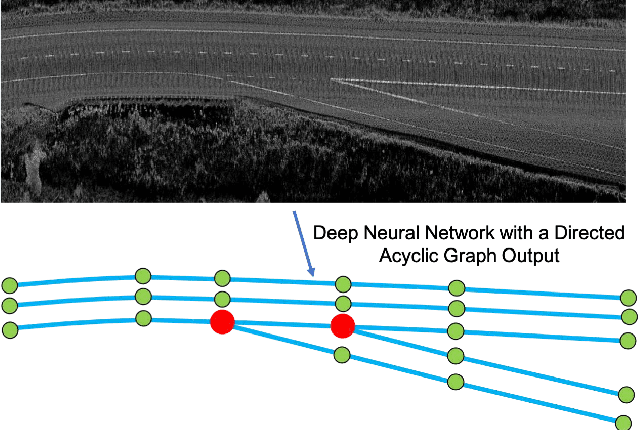

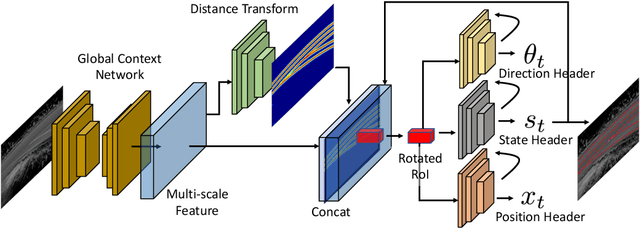
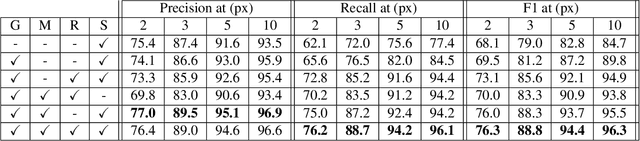
One of the fundamental challenges to scale self-driving is being able to create accurate high definition maps (HD maps) with low cost. Current attempts to automate this process typically focus on simple scenarios, estimate independent maps per frame or do not have the level of precision required by modern self driving vehicles. In contrast, in this paper we focus on drawing the lane boundaries of complex highways with many lanes that contain topology changes due to forks and merges. Towards this goal, we formulate the problem as inference in a directed acyclic graphical model (DAG), where the nodes of the graph encode geometric and topological properties of the local regions of the lane boundaries. Since we do not know a priori the topology of the lanes, we also infer the DAG topology (i.e., nodes and edges) for each region. We demonstrate the effectiveness of our approach on two major North American Highways in two different states and show high precision and recall as well as 89% correct topology.