 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWideDepth: Millimeter-Accurate Benchmark for Fisheye Depth Estimation
May 22, 2026Fisheye cameras are increasingly adopted in robotics for near-field manipulation, navigation, and immersive perception, yet indoor depth benchmarks with accurate ground truth are still missing. To address this, we introduce WideDepth - the first indoor dataset for fisheye depth estimation, featuring 101 scenes containing 5K high-resolution stereo pairs labeled with millimeter-level ground truth depth and disparity. Our dataset also includes paired pinhole and fisheye samples across varying fields of view and baselines in both horizontal and vertical stereo setups. We further propose a method to adapt pinhole-trained stereo models to fisheye images and introduce a novel stereo fisheye image generation pipeline based on high-resolution LiDAR scans. Leveraging these methods, we thoroughly evaluate state-of-the-art monocular depth, stereo matching, and depth completion models on our benchmark. Additionally, we provide 18K LiDAR-derived sparse depth training samples, achieving up to a 62% performance boost on fisheye data when fine-tuning pinhole-based stereo models. In summary, the high precision and versatility of our benchmark set a strong foundation for advancing research in fisheye depth estimation and robotics perception. Project page: https://ilyaind.github.io/WideDepth
EgoWalk: A Multimodal Dataset for Robot Navigation in the Wild
May 27, 2025Data-driven navigation algorithms are critically dependent on large-scale, high-quality real-world data collection for successful training and robust performance in realistic and uncontrolled conditions. To enhance the growing family of navigation-related real-world datasets, we introduce EgoWalk - a dataset of 50 hours of human navigation in a diverse set of indoor/outdoor, varied seasons, and location environments. Along with the raw and Imitation Learning-ready data, we introduce several pipelines to automatically create subsidiary datasets for other navigation-related tasks, namely natural language goal annotations and traversability segmentation masks. Diversity studies, use cases, and benchmarks for the proposed dataset are provided to demonstrate its practical applicability. We openly release all data processing pipelines and the description of the hardware platform used for data collection to support future research and development in robot navigation systems.
Continuous Gesture Recognition from sEMG Sensor Data with Recurrent Neural Networks and Adversarial Domain Adaptation
Dec 16, 2020
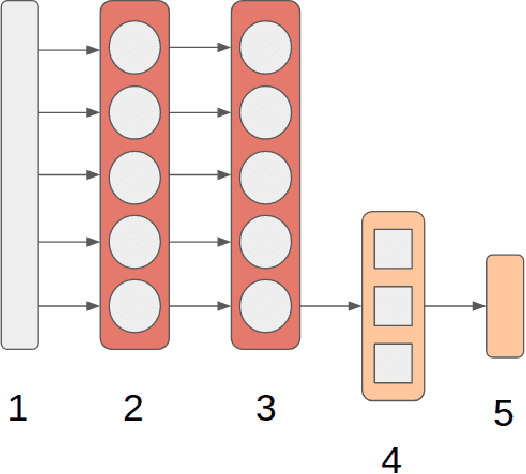
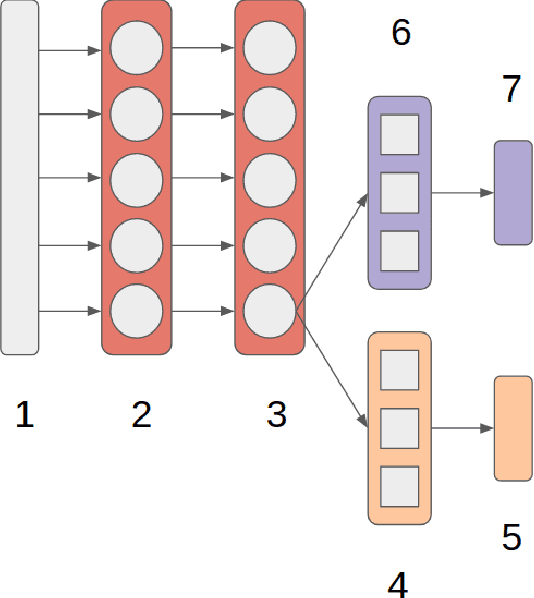
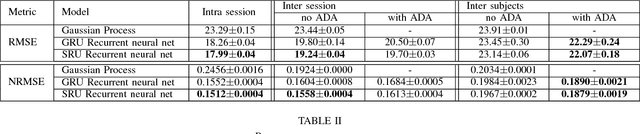
Movement control of artificial limbs has made big advances in recent years. New sensor and control technology enhanced the functionality and usefulness of artificial limbs to the point that complex movements, such as grasping, can be performed to a limited extent. To date, the most successful results were achieved by applying recurrent neural networks (RNNs). However, in the domain of artificial hands, experiments so far were limited to non-mobile wrists, which significantly reduces the functionality of such prostheses. In this paper, for the first time, we present empirical results on gesture recognition with both mobile and non-mobile wrists. Furthermore, we demonstrate that recurrent neural networks with simple recurrent units (SRU) outperform regular RNNs in both cases in terms of gesture recognition accuracy, on data acquired by an arm band sensing electromagnetic signals from arm muscles (via surface electromyography or sEMG). Finally, we show that adding domain adaptation techniques to continuous gesture recognition with RNN improves the transfer ability between subjects, where a limb controller trained on data from one person is used for another person.
Artificial Intelligence for Prosthetics - challenge solutions
Feb 07, 2019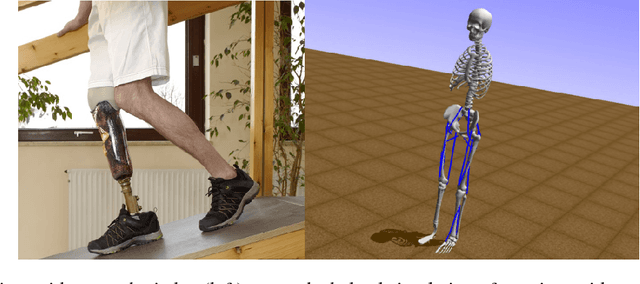
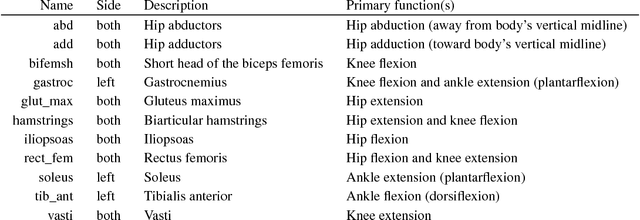
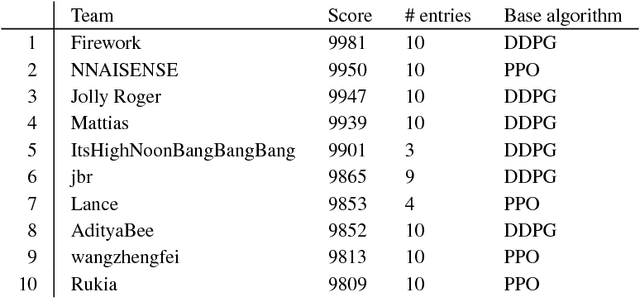

In the NeurIPS 2018 Artificial Intelligence for Prosthetics challenge, participants were tasked with building a controller for a musculoskeletal model with a goal of matching a given time-varying velocity vector. Top participants were invited to describe their algorithms. In this work, we describe the challenge and present thirteen solutions that used deep reinforcement learning approaches. Many solutions use similar relaxations and heuristics, such as reward shaping, frame skipping, discretization of the action space, symmetry, and policy blending. However, each team implemented different modifications of the known algorithms by, for example, dividing the task into subtasks, learning low-level control, or by incorporating expert knowledge and using imitation learning.