 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVL-KnG: Visual Scene Understanding for Navigation Goal Identification using Spatiotemporal Knowledge Graphs
Oct 01, 2025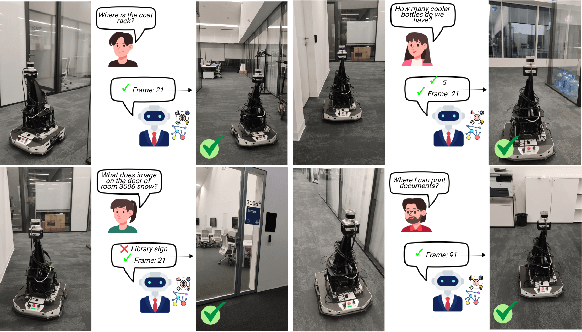
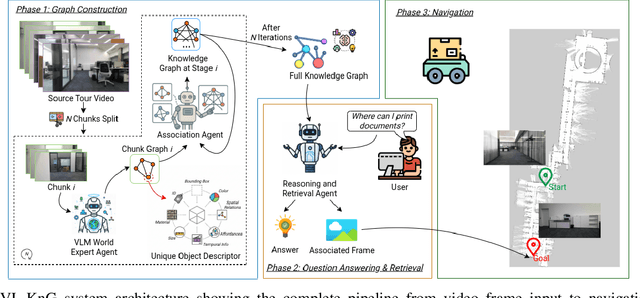
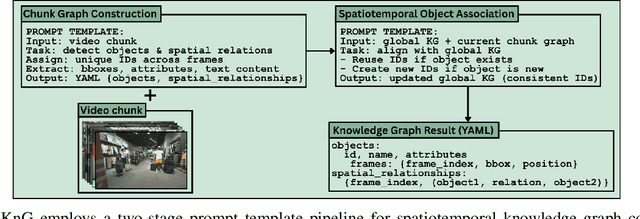
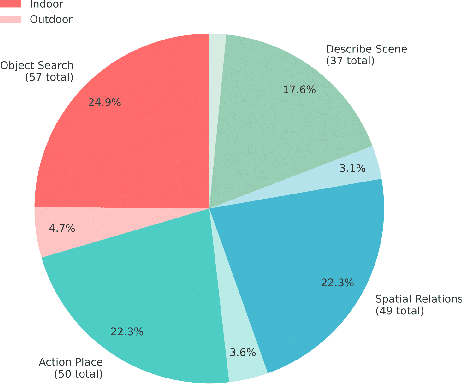
Vision-language models (VLMs) have shown potential for robot navigation but encounter fundamental limitations: they lack persistent scene memory, offer limited spatial reasoning, and do not scale effectively with video duration for real-time application. We present VL-KnG, a Visual Scene Understanding system that tackles these challenges using spatiotemporal knowledge graph construction and computationally efficient query processing for navigation goal identification. Our approach processes video sequences in chunks utilizing modern VLMs, creates persistent knowledge graphs that maintain object identity over time, and enables explainable spatial reasoning through queryable graph structures. We also introduce WalkieKnowledge, a new benchmark with about 200 manually annotated questions across 8 diverse trajectories spanning approximately 100 minutes of video data, enabling fair comparison between structured approaches and general-purpose VLMs. Real-world deployment on a differential drive robot demonstrates practical applicability, with our method achieving 77.27% success rate and 76.92% answer accuracy, matching Gemini 2.5 Pro performance while providing explainable reasoning supported by the knowledge graph, computational efficiency for real-time deployment across different tasks, such as localization, navigation and planning. Code and dataset will be released after acceptance.
PixelNav: Towards Model-based Vision-Only Navigation with Topological Graphs
Jul 28, 2025



This work proposes a novel hybrid approach for vision-only navigation of mobile robots, which combines advances of both deep learning approaches and classical model-based planning algorithms. Today, purely data-driven end-to-end models are dominant solutions to this problem. Despite advantages such as flexibility and adaptability, the requirement of a large amount of training data and limited interpretability are the main bottlenecks for their practical applications. To address these limitations, we propose a hierarchical system that utilizes recent advances in model predictive control, traversability estimation, visual place recognition, and pose estimation, employing topological graphs as a representation of the target environment. Using such a combination, we provide a scalable system with a higher level of interpretability compared to end-to-end approaches. Extensive real-world experiments show the efficiency of the proposed method.
EgoWalk: A Multimodal Dataset for Robot Navigation in the Wild
May 27, 2025Data-driven navigation algorithms are critically dependent on large-scale, high-quality real-world data collection for successful training and robust performance in realistic and uncontrolled conditions. To enhance the growing family of navigation-related real-world datasets, we introduce EgoWalk - a dataset of 50 hours of human navigation in a diverse set of indoor/outdoor, varied seasons, and location environments. Along with the raw and Imitation Learning-ready data, we introduce several pipelines to automatically create subsidiary datasets for other navigation-related tasks, namely natural language goal annotations and traversability segmentation masks. Diversity studies, use cases, and benchmarks for the proposed dataset are provided to demonstrate its practical applicability. We openly release all data processing pipelines and the description of the hardware platform used for data collection to support future research and development in robot navigation systems.
Social Robot Navigation through Constrained Optimization: a Comparative Study of Uncertainty-based Objectives and Constraints
May 04, 2023This work is dedicated to the study of how uncertainty estimation of the human motion prediction can be embedded into constrained optimization techniques, such as Model Predictive Control (MPC) for the social robot navigation. We propose several cost objectives and constraint functions obtained from the uncertainty of predicting pedestrian positions and related to the probability of the collision that can be applied to the MPC, and all the different variants are compared in challenging scenes with multiple agents. The main question this paper tries to answer is: what are the most important uncertainty-based criteria for social MPC? For that, we evaluate the proposed approaches with several social navigation metrics in an extensive set of scenarios of different complexity in reproducible synthetic environments. The main outcome of our study is a foundation for a practical guide on when and how to use uncertainty-aware approaches for social robot navigation in practice and what are the most effective criteria.
SmartPortraits: Depth Powered Handheld Smartphone Dataset of Human Portraits for State Estimation, Reconstruction and Synthesis
Apr 21, 2022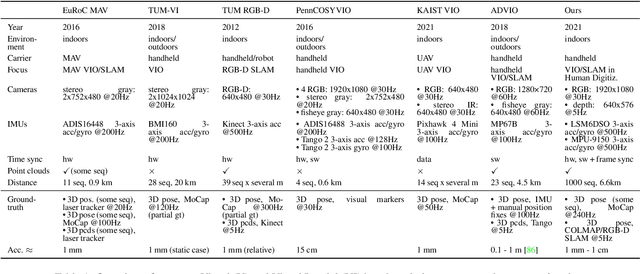
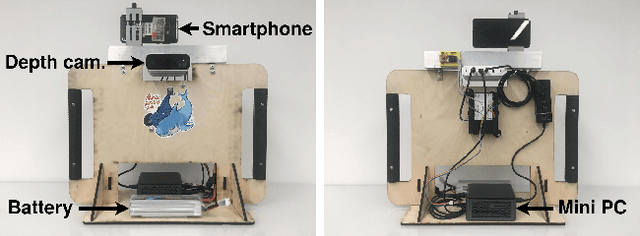

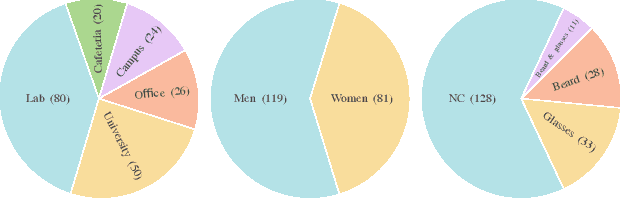
We present a dataset of 1000 video sequences of human portraits recorded in real and uncontrolled conditions by using a handheld smartphone accompanied by an external high-quality depth camera. The collected dataset contains 200 people captured in different poses and locations and its main purpose is to bridge the gap between raw measurements obtained from a smartphone and downstream applications, such as state estimation, 3D reconstruction, view synthesis, etc. The sensors employed in data collection are the smartphone's camera and Inertial Measurement Unit (IMU), and an external Azure Kinect DK depth camera software synchronized with sub-millisecond precision to the smartphone system. During the recording, the smartphone flash is used to provide a periodic secondary source of lightning. Accurate mask of the foremost person is provided as well as its impact on the camera alignment accuracy. For evaluation purposes, we compare multiple state-of-the-art camera alignment methods by using a Motion Capture system. We provide a smartphone visual-inertial benchmark for portrait capturing, where we report results for multiple methods and motivate further use of the provided trajectories, available in the dataset, in view synthesis and 3D reconstruction tasks.