 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocial Robot Navigation through Constrained Optimization: a Comparative Study of Uncertainty-based Objectives and Constraints
May 04, 2023This work is dedicated to the study of how uncertainty estimation of the human motion prediction can be embedded into constrained optimization techniques, such as Model Predictive Control (MPC) for the social robot navigation. We propose several cost objectives and constraint functions obtained from the uncertainty of predicting pedestrian positions and related to the probability of the collision that can be applied to the MPC, and all the different variants are compared in challenging scenes with multiple agents. The main question this paper tries to answer is: what are the most important uncertainty-based criteria for social MPC? For that, we evaluate the proposed approaches with several social navigation metrics in an extensive set of scenarios of different complexity in reproducible synthetic environments. The main outcome of our study is a foundation for a practical guide on when and how to use uncertainty-aware approaches for social robot navigation in practice and what are the most effective criteria.
DDPEN: Trajectory Optimisation With Sub Goal Generation Model
Jan 18, 2023



Differential dynamic programming (DDP) is a widely used and powerful trajectory optimization technique, however, due to its internal structure, it is not exempt from local minima. In this paper, we present Differential Dynamic Programming with Escape Network (DDPEN) - a novel approach to avoid DDP local minima by utilising an additional term used in the optimization criteria pointing towards the direction where robot should move in order to escape local minima. In order to produce the aforementioned directions, we propose to utilize a deep model that takes as an input the map of the environment in the form of a costmap together with the desired goal position. The Model produces possible future directions that will lead to the goal, avoiding local minima which is possible to run in real time conditions. The model is trained on a synthetic dataset and overall the system is evaluated at the Gazebo simulator. In this work we show that our proposed method allows avoiding local minima of trajectory optimization algorithm and successfully execute a trajectory 278 m long with various convex and nonconvex obstacles.
Conditioned Human Trajectory Prediction using Iterative Attention Blocks
Jun 29, 2022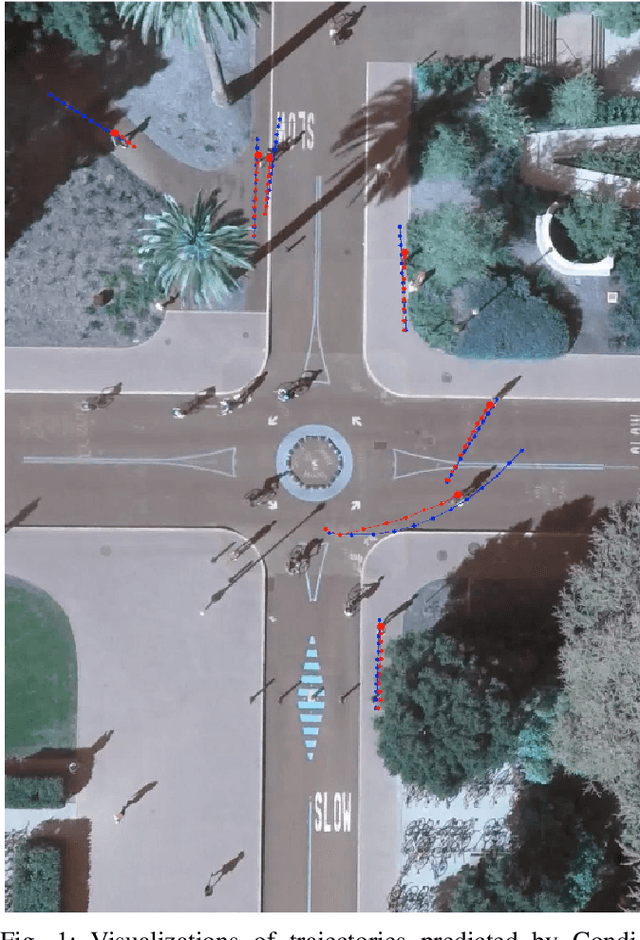
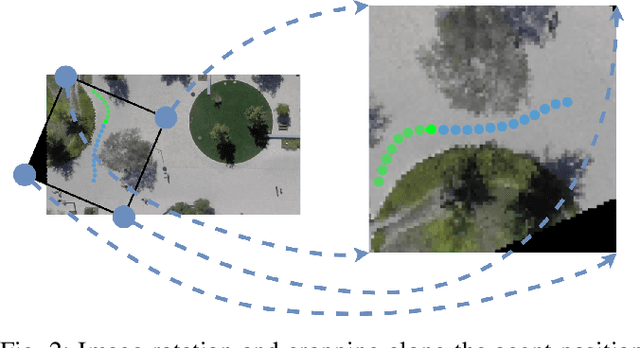
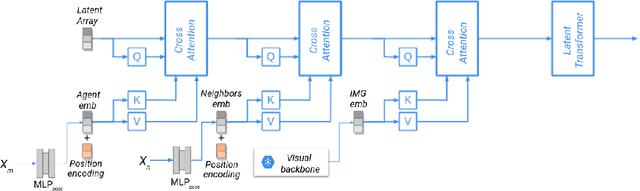
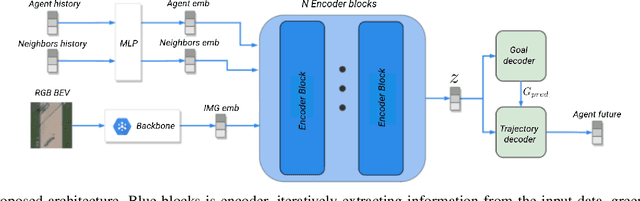
Human motion prediction is key to understand social environments, with direct applications in robotics, surveillance, etc. We present a simple yet effective pedestrian trajectory prediction model aimed at pedestrians positions prediction in urban-like environments conditioned by the environment: map and surround agents. Our model is a neural-based architecture that can run several layers of attention blocks and transformers in an iterative sequential fashion, allowing to capture the important features in the environment that improve prediction. We show that without explicit introduction of social masks, dynamical models, social pooling layers, or complicated graph-like structures, it is possible to produce on par results with SoTA models, which makes our approach easily extendable and configurable, depending on the data available. We report results performing similarly with SoTA models on publicly available and extensible-used datasets with unimodal prediction metrics ADE and FDE.
Transformer based trajectory prediction
Dec 08, 2021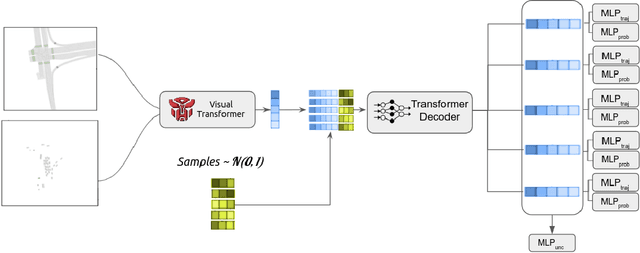
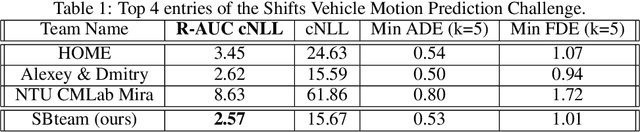
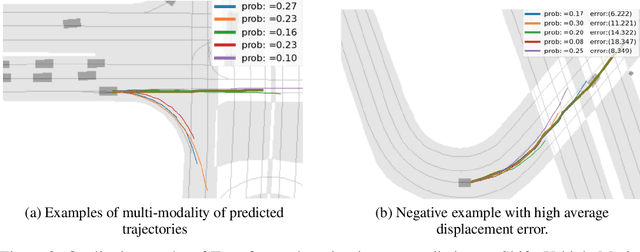
To plan a safe and efficient route, an autonomous vehicle should anticipate future motions of other agents around it. Motion prediction is an extremely challenging task which recently gained significant attention of the research community. In this work, we present a simple and yet strong baseline for uncertainty aware motion prediction based purely on transformer neural networks, which has shown its effectiveness in conditions of domain change. While being easy-to-implement, the proposed approach achieves competitive performance and ranks 1$^{st}$ on the 2021 Shifts Vehicle Motion Prediction Competition.
CovarianceNet: Conditional Generative Model for Correct Covariance Prediction in Human Motion Prediction
Sep 07, 2021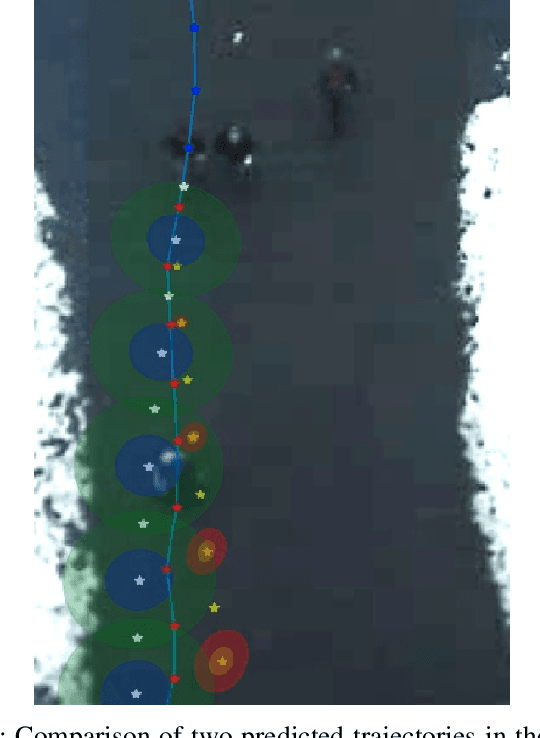
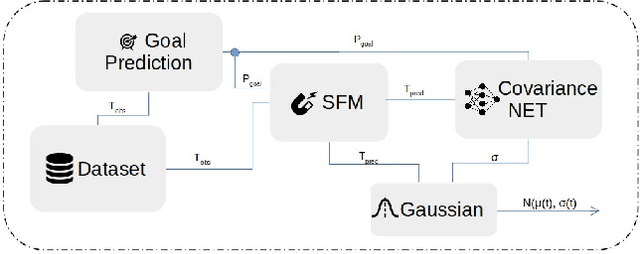
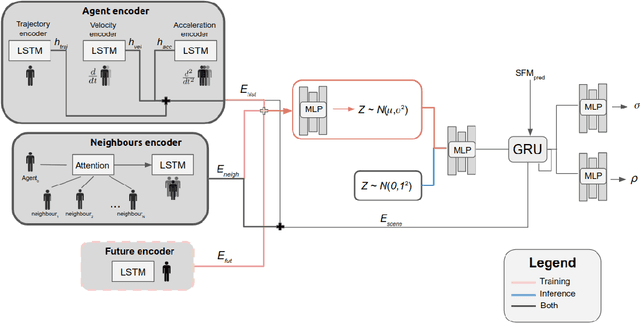
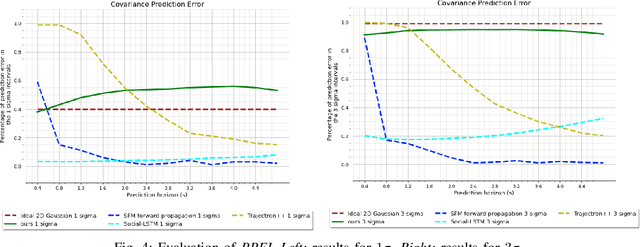
The correct characterization of uncertainty when predicting human motion is equally important as the accuracy of this prediction. We present a new method to correctly predict the uncertainty associated with the predicted distribution of future trajectories. Our approach, CovariaceNet, is based on a Conditional Generative Model with Gaussian latent variables in order to predict the parameters of a bi-variate Gaussian distribution. The combination of CovarianceNet with a motion prediction model results in a hybrid approach that outputs a uni-modal distribution. We will show how some state of the art methods in motion prediction become overconfident when predicting uncertainty, according to our proposed metric and validated in the ETH data-set \cite{pellegrini2009you}. CovarianceNet correctly predicts uncertainty, which makes our method suitable for applications that use predicted distributions, e.g., planning or decision making.
Coinbot: Intelligent Robotic Coin Bag Manipulation Using Deep Reinforcement Learning And Machine Teaching
Dec 02, 2020
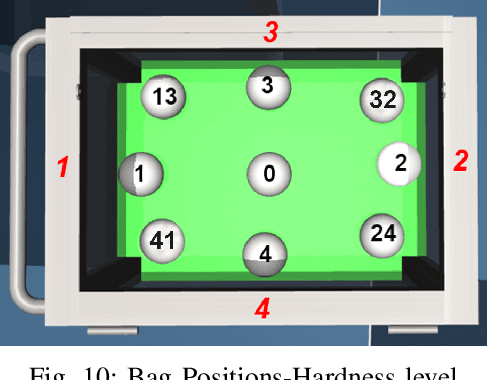
Given the laborious difficulty of moving heavy bags of physical currency in the cash center of the bank, there is a large demand for training and deploying safe autonomous systems capable of conducting such tasks in a collaborative workspace. However, the deformable properties of the bag along with the large quantity of rigid-body coins contained within it, significantly increases the challenges of bag detection, grasping and manipulation by a robotic gripper and arm. In this paper, we apply deep reinforcement learning and machine learning techniques to the task of controlling a collaborative robot to automate the unloading of coin bags from a trolley. To accomplish the task-specific process of gripping flexible materials like coin bags where the center of the mass changes during manipulation, a special gripper was implemented in simulation and designed in physical hardware. Leveraging a depth camera and object detection using deep learning, a bag detection and pose estimation has been done for choosing the optimal point of grasping. An intelligent approach based on deep reinforcement learning has been introduced to propose the best configuration of the robot end-effector to maximize successful grasping. A boosted motion planning is utilized to increase the speed of motion planning during robot operation. Real-world trials with the proposed pipeline have demonstrated success rates over 96\% in a real-world setting.