Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformer based trajectory prediction
Paper and Code
Dec 08, 2021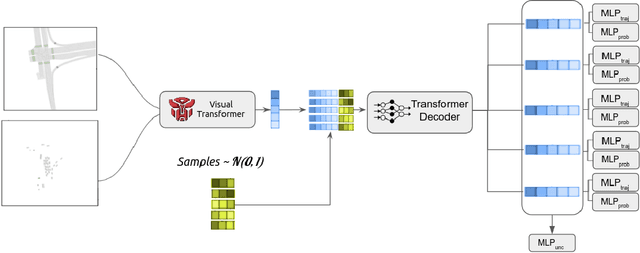
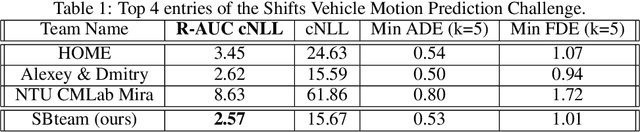
To plan a safe and efficient route, an autonomous vehicle should anticipate future motions of other agents around it. Motion prediction is an extremely challenging task which recently gained significant attention of the research community. In this work, we present a simple and yet strong baseline for uncertainty aware motion prediction based purely on transformer neural networks, which has shown its effectiveness in conditions of domain change. While being easy-to-implement, the proposed approach achieves competitive performance and ranks 1$^{st}$ on the 2021 Shifts Vehicle Motion Prediction Competition.
View paper on