 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBootstrapping Learned Cost Models with Synthetic SQL Queries
Aug 27, 2025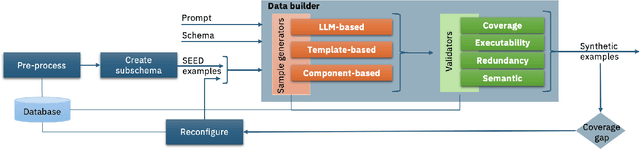
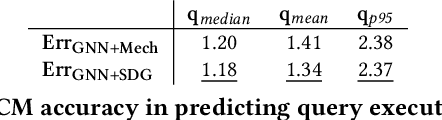
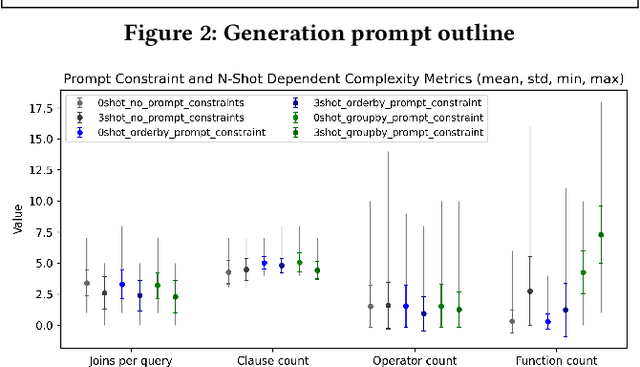
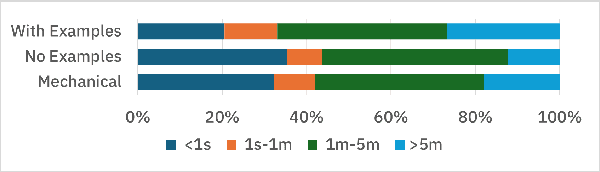
Having access to realistic workloads for a given database instance is extremely important to enable stress and vulnerability testing, as well as to optimize for cost and performance. Recent advances in learned cost models have shown that when enough diverse SQL queries are available, one can effectively and efficiently predict the cost of running a given query against a specific database engine. In this paper, we describe our experience in exploiting modern synthetic data generation techniques, inspired by the generative AI and LLM community, to create high-quality datasets enabling the effective training of such learned cost models. Initial results show that we can improve a learned cost model's predictive accuracy by training it with 45% fewer queries than when using competitive generation approaches.
Usage Governance Advisor: from Intent to AI Governance
Dec 02, 2024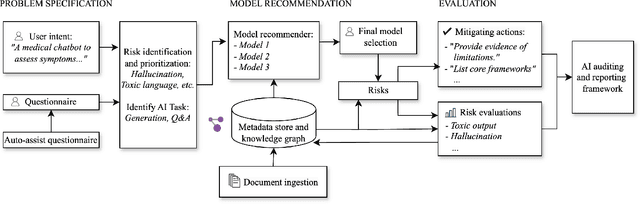
Evaluating the safety of AI Systems is a pressing concern for organizations deploying them. In addition to the societal damage done by the lack of fairness of those systems, deployers are concerned about the legal repercussions and the reputational damage incurred by the use of models that are unsafe. Safety covers both what a model does; e.g., can it be used to reveal personal information from its training set, and how a model was built; e.g., was it only trained on licensed data sets. Determining the safety of an AI system requires gathering information from a wide set of heterogeneous sources including safety benchmarks and technical documentation for the set of models used in that system. In addition, responsible use is encouraged through mechanisms that advise and help the user to take mitigating actions where safety risks are detected. We present Usage Governance Advisor which creates semi-structured governance information, identifies and prioritizes risks according to the intended use case, recommends appropriate benchmarks and risk assessments and importantly proposes mitigation strategies and actions.
Active Learning for Imbalanced Civil Infrastructure Data
Oct 19, 2022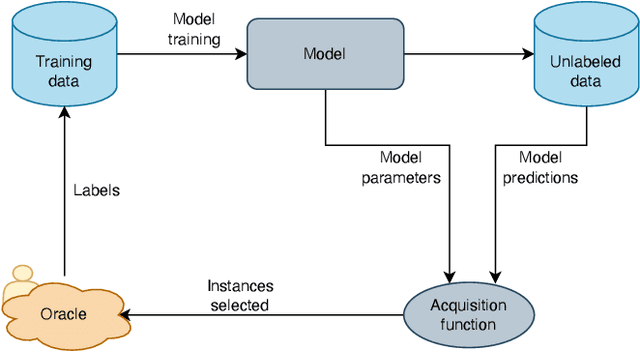
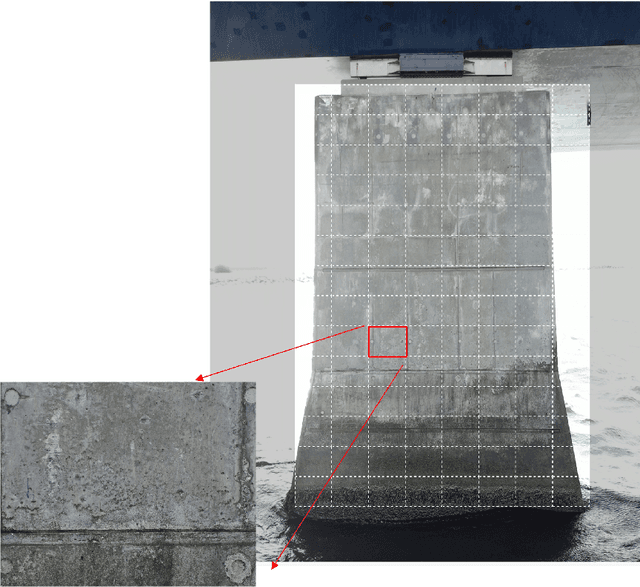
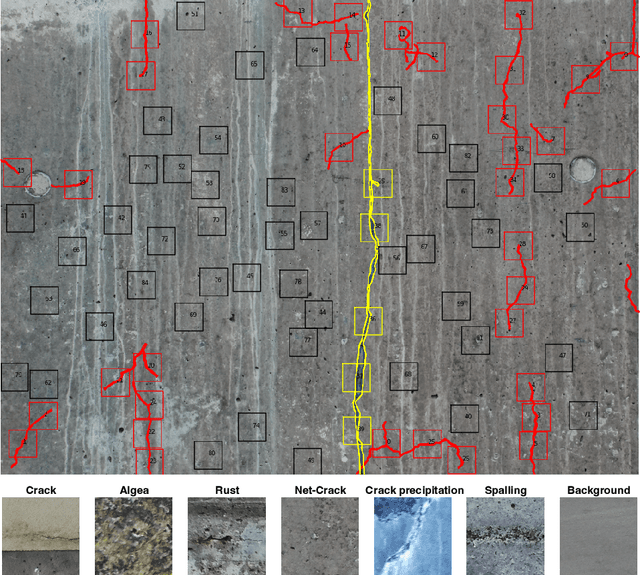
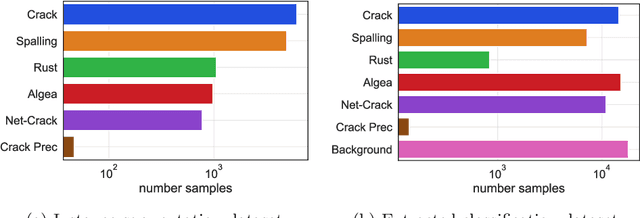
Aging civil infrastructures are closely monitored by engineers for damage and critical defects. As the manual inspection of such large structures is costly and time-consuming, we are working towards fully automating the visual inspections to support the prioritization of maintenance activities. To that end we combine recent advances in drone technology and deep learning. Unfortunately, annotation costs are incredibly high as our proprietary civil engineering dataset must be annotated by highly trained engineers. Active learning is, therefore, a valuable tool to optimize the trade-off between model performance and annotation costs. Our use-case differs from the classical active learning setting as our dataset suffers from heavy class imbalance and consists of a much larger already labeled data pool than other active learning research. We present a novel method capable of operating in this challenging setting by replacing the traditional active learning acquisition function with an auxiliary binary discriminator. We experimentally show that our novel method outperforms the best-performing traditional active learning method (BALD) by 5% and 38% accuracy on CIFAR-10 and our proprietary dataset respectively.
Model-Assisted Labeling via Explainability for Visual Inspection of Civil Infrastructures
Sep 22, 2022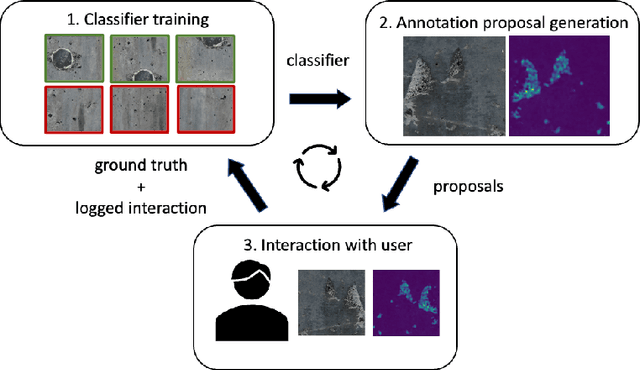
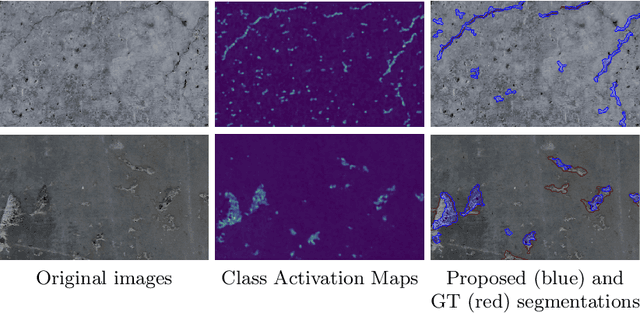
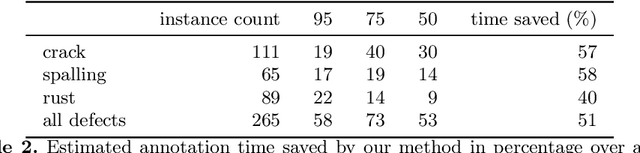
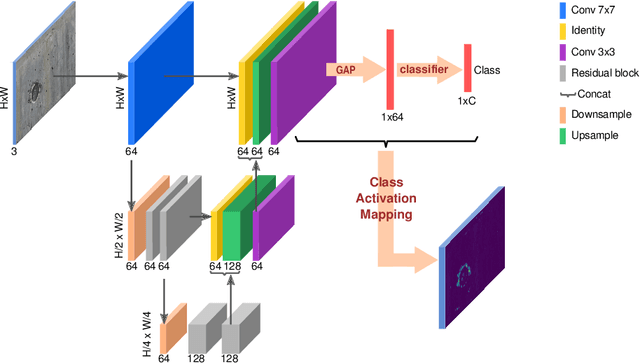
Labeling images for visual segmentation is a time-consuming task which can be costly, particularly in application domains where labels have to be provided by specialized expert annotators, such as civil engineering. In this paper, we propose to use attribution methods to harness the valuable interactions between expert annotators and the data to be annotated in the case of defect segmentation for visual inspection of civil infrastructures. Concretely, a classifier is trained to detect defects and coupled with an attribution-based method and adversarial climbing to generate and refine segmentation masks corresponding to the classification outputs. These are used within an assisted labeling framework where the annotators can interact with them as proposal segmentation masks by deciding to accept, reject or modify them, and interactions are logged as weak labels to further refine the classifier. Applied on a real-world dataset resulting from the automated visual inspection of bridges, our proposed method is able to save more than 50\% of annotators' time when compared to manual annotation of defects.
From Time Series to Euclidean Spaces: On Spatial Transformations for Temporal Clustering
Oct 02, 2020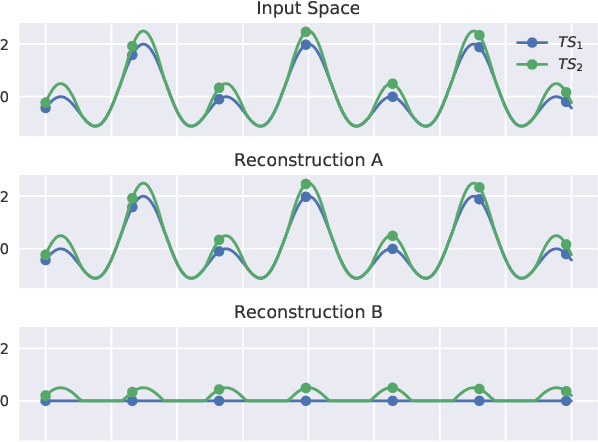
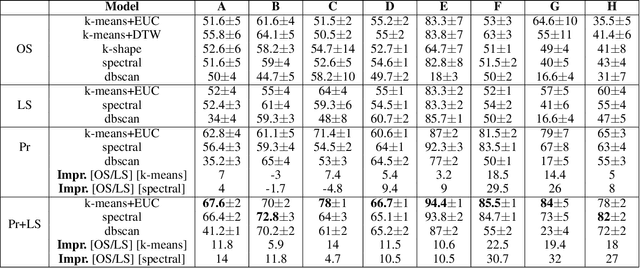
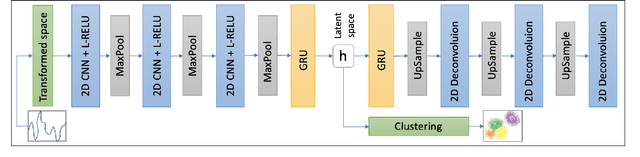
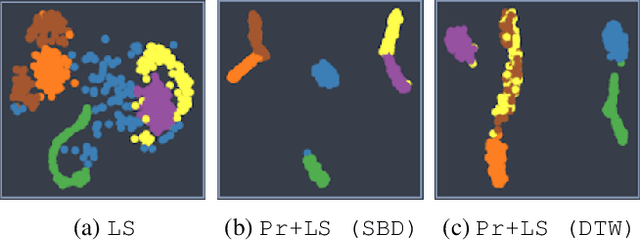
Unsupervised clustering of temporal data is both challenging and crucial in machine learning. In this paper, we show that neither traditional clustering methods, time series specific or even deep learning-based alternatives generalise well when both varying sampling rates and high dimensionality are present in the input data. We propose a novel approach to temporal clustering, in which we (1) transform the input time series into a distance-based projected representation by using similarity measures suitable for dealing with temporal data,(2) feed these projections into a multi-layer CNN-GRU autoencoder to generate meaningful domain-aware latent representations, which ultimately (3) allow for a natural separation of clusters beneficial for most important traditional clustering algorithms. We evaluate our approach on time series datasets from various domains and show that it not only outperforms existing methods in all cases, by up to 32%, but is also robust and incurs negligible computation overheads.
Explainable Failure Predictions with RNN Classifiers based on Time Series Data
Jan 20, 2019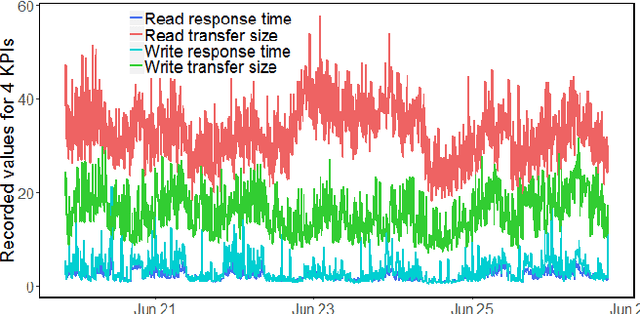
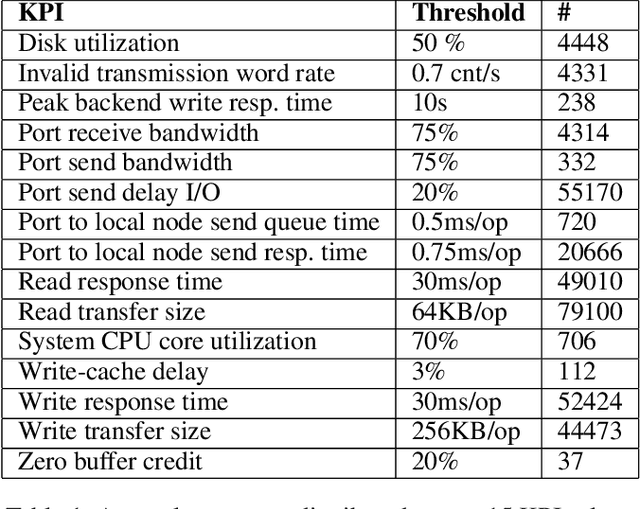
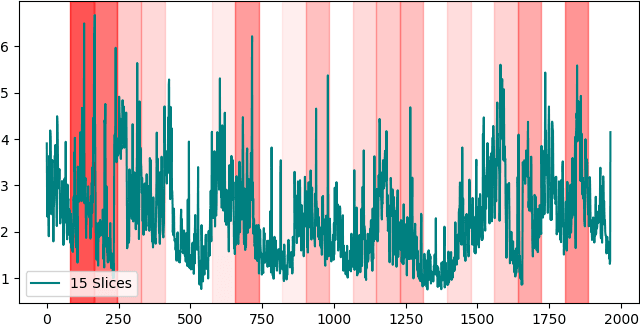
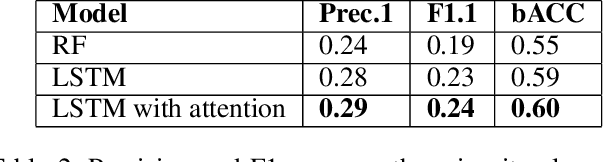
Given key performance indicators collected with fine granularity as time series, our aim is to predict and explain failures in storage environments. Although explainable predictive modeling based on spiky telemetry data is key in many domains, current approaches cannot tackle this problem. Deep learning methods suitable for sequence modeling and learning temporal dependencies, such as RNNs, are effective, but opaque from an explainability perspective. Our approach first extracts the anomalous spikes from time series as events and then builds an RNN classifier with attention mechanisms to embed the irregularity and frequency of these events. A preliminary evaluation on real world storage environments shows that our approach can predict failures within a 3-day prediction window with comparable accuracy as traditional RNN-based classifiers. At the same time it can explain the predictions by returning the key anomalous events which led to those failure predictions.