 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Point Cloud Geometry as a Statistical Manifold: Theory and Practice
May 11, 2026Point clouds are a fundamental representation for robotic perception tasks such as localization, mapping, and object pose estimation. However, LiDAR-acquired point clouds are inherently sparse and non-uniform, providing incomplete observations of the underlying scene geometry. This makes reliable geometric reasoning challenging and degrades downstream perception performance. Existing approaches attempt to compensate for these limitations by estimating local geometry, but often rely on hand-crafted statistics or end-to-end supervised learning, which can suffer from limited scalability or require large amounts of accurately labeled data. To address these challenges, we explicitly model point cloud geometry under a principled mathematical formulation. We represent local geometry as a statistical manifold induced by a family of Gaussian distributions, where each point is associated with a Gaussian capturing its local geometric structure. Based on this formulation, we introduce Point-to-Ellipsoid (POLI), a deep neural estimator that predicts per-point Gaussian geometry. POLI learns a mapping from point cloud observations to their underlying geometry in a self-supervised manner, removing the need for labeled data while preserving strong geometric inductive biases. The resulting representation integrates seamlessly into existing robotic perception pipelines without architectural modifications. Extensive experiments show that POLI enables accurate and robust geometry estimation and consistently improves performance across diverse robotic perception tasks.
Kernel-SDF: An Open-Source Library for Real-Time Signed Distance Function Estimation using Kernel Regression
Mar 31, 2026Accurate and efficient environment representation is crucial for robotic applications such as motion planning, manipulation, and navigation. Signed distance functions (SDFs) have emerged as a powerful representation for encoding distance to obstacle boundaries, enabling efficient collision-checking and trajectory optimization techniques. However, existing SDF reconstruction methods have limitations when it comes to large-scale uncertainty-aware SDF estimation from streaming sensor data. Voxel-based approaches are limited by fixed resolution and lack uncertainty quantification, neural network methods require significant training time, while Gaussian process (GP) methods struggle with scalability, sign estimation, and uncertainty calibration. In this letter, we develop an open-source library, Kernel-SDF, which uses kernel regression to learn SDF with calibrated uncertainty quantification in real-time. Our approach consists of a front-end that learns a continuous occupancy field via kernel regression, and a back-end that estimates accurate SDF via GP regression using samples from the front-end surface boundaries. Kernel-SDF provides accurate SDF, SDF gradient, SDF uncertainty, and mesh construction in real-time. Evaluation results show that Kernel-SDF achieves superior accuracy compared to existing methods, while maintaining real-time performance, making it suitable for various robotics applications requiring reliable uncertainty-aware geometric information.
Communication-Free Collective Navigation for a Swarm of UAVs via LiDAR-Based Deep Reinforcement Learning
Jan 20, 2026This paper presents a deep reinforcement learning (DRL) based controller for collective navigation of unmanned aerial vehicle (UAV) swarms in communication-denied environments, enabling robust operation in complex, obstacle-rich environments. Inspired by biological swarms where informed individuals guide groups without explicit communication, we employ an implicit leader-follower framework. In this paradigm, only the leader possesses goal information, while follower UAVs learn robust policies using only onboard LiDAR sensing, without requiring any inter-agent communication or leader identification. Our system utilizes LiDAR point clustering and an extended Kalman filter for stable neighbor tracking, providing reliable perception independent of external positioning systems. The core of our approach is a DRL controller, trained in GPU-accelerated Nvidia Isaac Sim, that enables followers to learn complex emergent behaviors - balancing flocking and obstacle avoidance - using only local perception. This allows the swarm to implicitly follow the leader while robustly addressing perceptual challenges such as occlusion and limited field-of-view. The robustness and sim-to-real transfer of our approach are confirmed through extensive simulations and challenging real-world experiments with a swarm of five UAVs, which successfully demonstrated collective navigation across diverse indoor and outdoor environments without any communication or external localization.
Optimizing Indoor Farm Monitoring Efficiency Using UAV: Yield Estimation in a GNSS-Denied Cherry Tomato Greenhouse
May 02, 2025


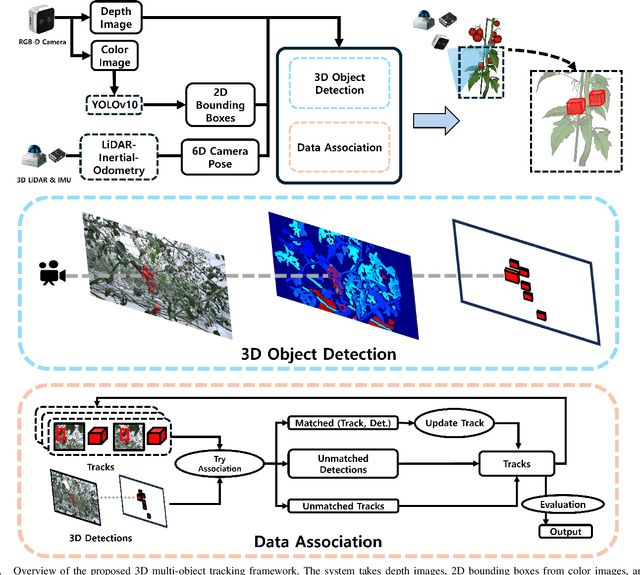
As the agricultural workforce declines and labor costs rise, robotic yield estimation has become increasingly important. While unmanned ground vehicles (UGVs) are commonly used for indoor farm monitoring, their deployment in greenhouses is often constrained by infrastructure limitations, sensor placement challenges, and operational inefficiencies. To address these issues, we develop a lightweight unmanned aerial vehicle (UAV) equipped with an RGB-D camera, a 3D LiDAR, and an IMU sensor. The UAV employs a LiDAR-inertial odometry algorithm for precise navigation in GNSS-denied environments and utilizes a 3D multi-object tracking algorithm to estimate the count and weight of cherry tomatoes. We evaluate the system using two dataset: one from a harvesting row and another from a growing row. In the harvesting-row dataset, the proposed system achieves 94.4\% counting accuracy and 87.5\% weight estimation accuracy within a 13.2-meter flight completed in 10.5 seconds. For the growing-row dataset, which consists of occluded unripened fruits, we qualitatively analyze tracking performance and highlight future research directions for improving perception in greenhouse with strong occlusions. Our findings demonstrate the potential of UAVs for efficient robotic yield estimation in commercial greenhouses.
Doppler Correspondence: Non-Iterative Scan Matching With Doppler Velocity-Based Correspondence
Feb 17, 2025


Achieving successful scan matching is essential for LiDAR odometry. However, in challenging environments with adverse weather conditions or repetitive geometric patterns, LiDAR odometry performance is degraded due to incorrect scan matching. Recently, the emergence of frequency-modulated continuous wave 4D LiDAR and 4D radar technologies has provided the potential to address these unfavorable conditions. The term 4D refers to point cloud data characterized by range, azimuth, and elevation along with Doppler velocity. Although 4D data is available, most scan matching methods for 4D LiDAR and 4D radar still establish correspondence by repeatedly identifying the closest points between consecutive scans, overlooking the Doppler information. This paper introduces, for the first time, a simple Doppler velocity-based correspondence -- Doppler Correspondence -- that is invariant to translation and small rotation of the sensor, with its geometric and kinematic foundations. Extensive experiments demonstrate that the proposed method enables the direct matching of consecutive point clouds without an iterative process, making it computationally efficient. Additionally, it provides a more robust correspondence estimation in environments with repetitive geometric patterns.
Kalman Filter-Based Distributed Gaussian Process for Unknown Scalar Field Estimation in Wireless Sensor Networks
Feb 09, 2025



In this letter, we propose an online scalar field estimation algorithm of unknown environments using a distributed Gaussian process (DGP) framework in wireless sensor networks (WSNs). While the kernel-based Gaussian process (GP) has been widely employed for estimating unknown scalar fields, its centralized nature is not well-suited for handling a large amount of data from WSNs. To overcome the limitations of the kernel-based GP, recent advancements in GP research focus on approximating kernel functions as products of E-dimensional nonlinear basis functions, which can handle large WSNs more efficiently in a distributed manner. However, this approach requires a large number of basis functions for accurate approximation, leading to increased computational and communication complexities. To address these complexity issues, the paper proposes a distributed GP framework by incorporating a Kalman filter scheme (termed as K-DGP), which scales linearly with the number of nonlinear basis functions. Moreover, we propose a new consensus protocol designed to handle the unique data transmission requirement residing in the proposed K-DGP framework. This protocol preserves the inherent elements in the form of a certain column in the nonlinear function matrix of the communicated message; it enables wireless sensors to cooperatively estimate the environment and reach the global consensus through distributed learning with faster convergence than the widely-used average consensus protocol. Simulation results demonstrate rapid consensus convergence and outstanding estimation accuracy achieved by the proposed K-DGP algorithm. The scalability and efficiency of the proposed approach are further demonstrated by online dynamic environment estimation using WSNs.
RAPID: Robust and Agile Planner Using Inverse Reinforcement Learning for Vision-Based Drone Navigation
Feb 04, 2025This paper introduces a learning-based visual planner for agile drone flight in cluttered environments. The proposed planner generates collision-free waypoints in milliseconds, enabling drones to perform agile maneuvers in complex environments without building separate perception, mapping, and planning modules. Learning-based methods, such as behavior cloning (BC) and reinforcement learning (RL), demonstrate promising performance in visual navigation but still face inherent limitations. BC is susceptible to compounding errors due to limited expert imitation, while RL struggles with reward function design and sample inefficiency. To address these limitations, this paper proposes an inverse reinforcement learning (IRL)-based framework for high-speed visual navigation. By leveraging IRL, it is possible to reduce the number of interactions with simulation environments and improve capability to deal with high-dimensional spaces while preserving the robustness of RL policies. A motion primitive-based path planning algorithm collects an expert dataset with privileged map data from diverse environments, ensuring comprehensive scenario coverage. By leveraging both the acquired expert and learner dataset gathered from the agent's interactions with the simulation environments, a robust reward function and policy are learned across diverse states. While the proposed method is trained in a simulation environment only, it can be directly applied to real-world scenarios without additional training or tuning. The performance of the proposed method is validated in both simulation and real-world environments, including forests and various structures. The trained policy achieves an average speed of 7 m/s and a maximum speed of 8.8 m/s in real flight experiments. To the best of our knowledge, this is the first work to successfully apply an IRL framework for high-speed visual navigation of drones.
Enhancing Exploration Efficiency using Uncertainty-Aware Information Prediction
Dec 17, 2024



Autonomous exploration is a crucial aspect of robotics, enabling robots to explore unknown environments and generate maps without prior knowledge. This paper proposes a method to enhance exploration efficiency by integrating neural network-based occupancy grid map prediction with uncertainty-aware Bayesian neural network. Uncertainty from neural network-based occupancy grid map prediction is probabilistically integrated into mutual information for exploration. To demonstrate the effectiveness of the proposed method, we conducted comparative simulations within a frontier exploration framework in a realistic simulator environment against various information metrics. The proposed method showed superior performance in terms of exploration efficiency.
Design and Identification of Keypoint Patches in Unstructured Environments
Oct 01, 2024



Reliable perception of targets is crucial for the stable operation of autonomous robots. A widely preferred method is keypoint identification in an image, as it allows direct mapping from raw images to 2D coordinates, facilitating integration with other algorithms like localization and path planning. In this study, we closely examine the design and identification of keypoint patches in cluttered environments, where factors such as blur and shadows can hinder detection. We propose four simple yet distinct designs that consider various scale, rotation and camera projection using a limited number of pixels. Additionally, we customize the Superpoint network to ensure robust detection under various types of image degradation. The effectiveness of our approach is demonstrated through real-world video tests, highlighting potential for vision-based autonomous systems.
Exploration in Deep Reinforcement Learning: A Survey
May 02, 2022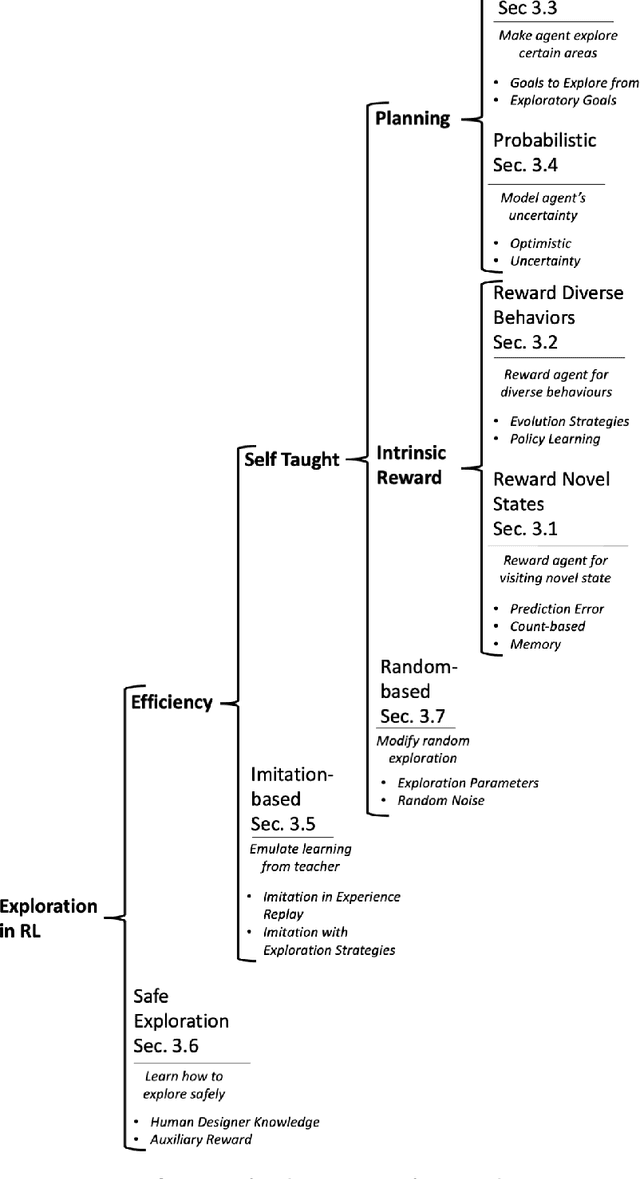
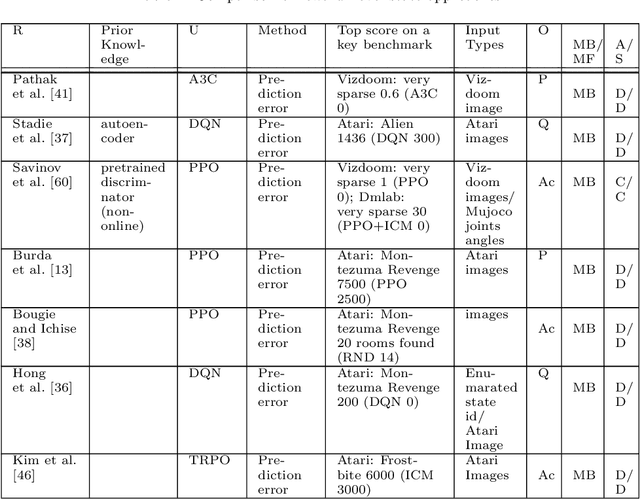
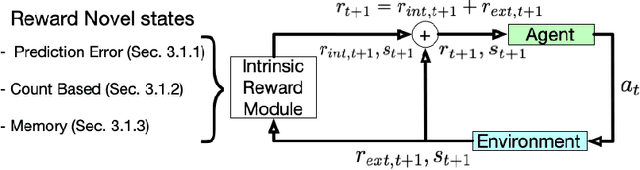
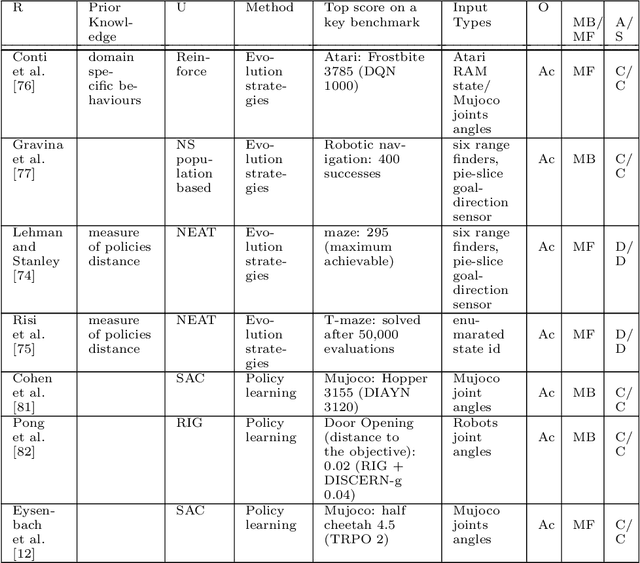
This paper reviews exploration techniques in deep reinforcement learning. Exploration techniques are of primary importance when solving sparse reward problems. In sparse reward problems, the reward is rare, which means that the agent will not find the reward often by acting randomly. In such a scenario, it is challenging for reinforcement learning to learn rewards and actions association. Thus more sophisticated exploration methods need to be devised. This review provides a comprehensive overview of existing exploration approaches, which are categorized based on the key contributions as follows reward novel states, reward diverse behaviours, goal-based methods, probabilistic methods, imitation-based methods, safe exploration and random-based methods. Then, the unsolved challenges are discussed to provide valuable future research directions. Finally, the approaches of different categories are compared in terms of complexity, computational effort and overall performance.