 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Indoor Farm Monitoring Efficiency Using UAV: Yield Estimation in a GNSS-Denied Cherry Tomato Greenhouse
May 02, 2025


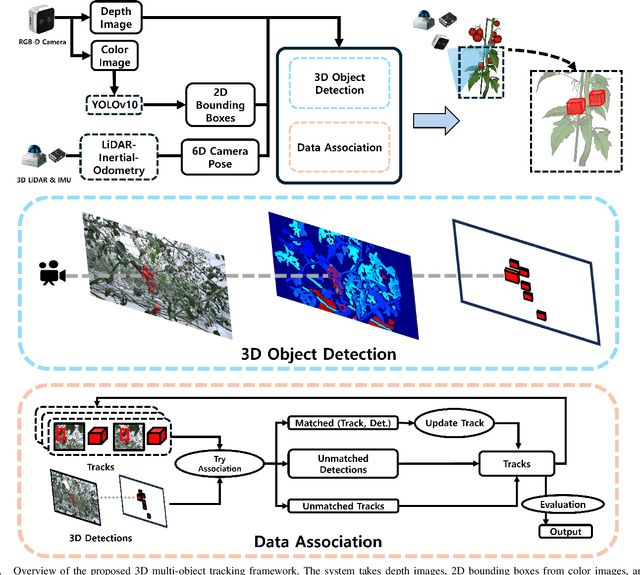
As the agricultural workforce declines and labor costs rise, robotic yield estimation has become increasingly important. While unmanned ground vehicles (UGVs) are commonly used for indoor farm monitoring, their deployment in greenhouses is often constrained by infrastructure limitations, sensor placement challenges, and operational inefficiencies. To address these issues, we develop a lightweight unmanned aerial vehicle (UAV) equipped with an RGB-D camera, a 3D LiDAR, and an IMU sensor. The UAV employs a LiDAR-inertial odometry algorithm for precise navigation in GNSS-denied environments and utilizes a 3D multi-object tracking algorithm to estimate the count and weight of cherry tomatoes. We evaluate the system using two dataset: one from a harvesting row and another from a growing row. In the harvesting-row dataset, the proposed system achieves 94.4\% counting accuracy and 87.5\% weight estimation accuracy within a 13.2-meter flight completed in 10.5 seconds. For the growing-row dataset, which consists of occluded unripened fruits, we qualitatively analyze tracking performance and highlight future research directions for improving perception in greenhouse with strong occlusions. Our findings demonstrate the potential of UAVs for efficient robotic yield estimation in commercial greenhouses.
Design and Identification of Keypoint Patches in Unstructured Environments
Oct 01, 2024



Reliable perception of targets is crucial for the stable operation of autonomous robots. A widely preferred method is keypoint identification in an image, as it allows direct mapping from raw images to 2D coordinates, facilitating integration with other algorithms like localization and path planning. In this study, we closely examine the design and identification of keypoint patches in cluttered environments, where factors such as blur and shadows can hinder detection. We propose four simple yet distinct designs that consider various scale, rotation and camera projection using a limited number of pixels. Additionally, we customize the Superpoint network to ensure robust detection under various types of image degradation. The effectiveness of our approach is demonstrated through real-world video tests, highlighting potential for vision-based autonomous systems.