 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication-Free Collective Navigation for a Swarm of UAVs via LiDAR-Based Deep Reinforcement Learning
Jan 20, 2026This paper presents a deep reinforcement learning (DRL) based controller for collective navigation of unmanned aerial vehicle (UAV) swarms in communication-denied environments, enabling robust operation in complex, obstacle-rich environments. Inspired by biological swarms where informed individuals guide groups without explicit communication, we employ an implicit leader-follower framework. In this paradigm, only the leader possesses goal information, while follower UAVs learn robust policies using only onboard LiDAR sensing, without requiring any inter-agent communication or leader identification. Our system utilizes LiDAR point clustering and an extended Kalman filter for stable neighbor tracking, providing reliable perception independent of external positioning systems. The core of our approach is a DRL controller, trained in GPU-accelerated Nvidia Isaac Sim, that enables followers to learn complex emergent behaviors - balancing flocking and obstacle avoidance - using only local perception. This allows the swarm to implicitly follow the leader while robustly addressing perceptual challenges such as occlusion and limited field-of-view. The robustness and sim-to-real transfer of our approach are confirmed through extensive simulations and challenging real-world experiments with a swarm of five UAVs, which successfully demonstrated collective navigation across diverse indoor and outdoor environments without any communication or external localization.
Doppler Correspondence: Non-Iterative Scan Matching With Doppler Velocity-Based Correspondence
Feb 17, 2025

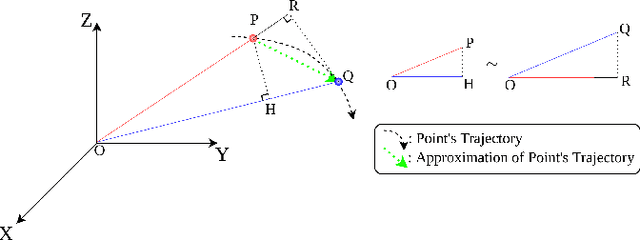

Achieving successful scan matching is essential for LiDAR odometry. However, in challenging environments with adverse weather conditions or repetitive geometric patterns, LiDAR odometry performance is degraded due to incorrect scan matching. Recently, the emergence of frequency-modulated continuous wave 4D LiDAR and 4D radar technologies has provided the potential to address these unfavorable conditions. The term 4D refers to point cloud data characterized by range, azimuth, and elevation along with Doppler velocity. Although 4D data is available, most scan matching methods for 4D LiDAR and 4D radar still establish correspondence by repeatedly identifying the closest points between consecutive scans, overlooking the Doppler information. This paper introduces, for the first time, a simple Doppler velocity-based correspondence -- Doppler Correspondence -- that is invariant to translation and small rotation of the sensor, with its geometric and kinematic foundations. Extensive experiments demonstrate that the proposed method enables the direct matching of consecutive point clouds without an iterative process, making it computationally efficient. Additionally, it provides a more robust correspondence estimation in environments with repetitive geometric patterns.
RAPID: Robust and Agile Planner Using Inverse Reinforcement Learning for Vision-Based Drone Navigation
Feb 04, 2025This paper introduces a learning-based visual planner for agile drone flight in cluttered environments. The proposed planner generates collision-free waypoints in milliseconds, enabling drones to perform agile maneuvers in complex environments without building separate perception, mapping, and planning modules. Learning-based methods, such as behavior cloning (BC) and reinforcement learning (RL), demonstrate promising performance in visual navigation but still face inherent limitations. BC is susceptible to compounding errors due to limited expert imitation, while RL struggles with reward function design and sample inefficiency. To address these limitations, this paper proposes an inverse reinforcement learning (IRL)-based framework for high-speed visual navigation. By leveraging IRL, it is possible to reduce the number of interactions with simulation environments and improve capability to deal with high-dimensional spaces while preserving the robustness of RL policies. A motion primitive-based path planning algorithm collects an expert dataset with privileged map data from diverse environments, ensuring comprehensive scenario coverage. By leveraging both the acquired expert and learner dataset gathered from the agent's interactions with the simulation environments, a robust reward function and policy are learned across diverse states. While the proposed method is trained in a simulation environment only, it can be directly applied to real-world scenarios without additional training or tuning. The performance of the proposed method is validated in both simulation and real-world environments, including forests and various structures. The trained policy achieves an average speed of 7 m/s and a maximum speed of 8.8 m/s in real flight experiments. To the best of our knowledge, this is the first work to successfully apply an IRL framework for high-speed visual navigation of drones.
Enhancing Exploration Efficiency using Uncertainty-Aware Information Prediction
Dec 17, 2024



Autonomous exploration is a crucial aspect of robotics, enabling robots to explore unknown environments and generate maps without prior knowledge. This paper proposes a method to enhance exploration efficiency by integrating neural network-based occupancy grid map prediction with uncertainty-aware Bayesian neural network. Uncertainty from neural network-based occupancy grid map prediction is probabilistically integrated into mutual information for exploration. To demonstrate the effectiveness of the proposed method, we conducted comparative simulations within a frontier exploration framework in a realistic simulator environment against various information metrics. The proposed method showed superior performance in terms of exploration efficiency.