 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStableHand: Quality-Aware Flow Matching for World-Space Dual-Hand Motion Estimation from Egocentric Video
May 18, 2026Recovering world space 4D motion of two interacting hands from egocentric video is a fundamental capability for supervising robot policy learning, where wrist trajectories track the end-effector and finger articulations specify the grasp pose. Two major challenges arise in this setting: hands frequently leave the camera view for extended periods due to head motion, and persistent hand-object interactions cause severe occlusions of one or both hands. Existing methods uniformly condition on noisy hand motion observations without accounting for their per-frame reliability, leading to substantial performance degradation. Our key insight is that accurate world space hand motion estimation is tightly coupled with the quality of per-frame hand observations. To this end, we decompose the quality of hand motion observations extracted from an off-the-shelf hand pose estimator into four channels: wrist global translation and finger articulations for both hands. We propose StableHand, a quality-aware flow-matching framework conditioned on these four-channel quality signals, which are predicted by a learned quality network. We naturally incorporate the quality signals into the flow-matching process through a per-channel forward schedule, a quality-adjusted velocity target, AdaLN modulation of the DiT denoiser, and a quality-aware ODE initialization. This unified generative process preserves high-quality observations while reconstructing unreliable ones using a learned bimanual motion prior. Experiments on HOT3D and ARCTIC, two egocentric benchmarks featuring long missing-hand spans and persistent hand-object occlusions, show that StableHand achieves state-of-the-art performance across all reported metrics, reducing W-MPJPE by 20-25% compared to the strongest baseline, with the largest gains on heavily occluded ARCTIC sequences.
EgoFlow: Gradient-Guided Flow Matching for Egocentric 6DoF Object Motion Generation
Apr 01, 2026Understanding and predicting object motion from egocentric video is fundamental to embodied perception and interaction. However, generating physically consistent 6DoF trajectories remains challenging due to occlusions, fast motion, and the lack of explicit physical reasoning in existing generative models. We present EgoFlow, a flow-matching framework that synthesizes realistic and physically plausible trajectories conditioned on multimodal egocentric observations. EgoFlow employs a hybrid Mamba-Transformer-Perceiver architecture to jointly model temporal dynamics, scene geometry, and semantic intent, while a gradient-guided inference process enforces differentiable physical constraints such as collision avoidance and motion smoothness. This combination yields coherent and controllable motion generation without post-hoc filtering or additional supervision. Experiments on real-world datasets HD-EPIC, EgoExo4D, and HOT3D show that EgoFlow outperforms diffusion-based and transformer baselines in accuracy, generalization, and physical realism, reducing collision rates by up to 79%, and strong generalization to unseen scenes. Our results highlight the promise of flow-based generative modeling for scalable and physically grounded egocentric motion understanding.
GMT: Goal-Conditioned Multimodal Transformer for 6-DOF Object Trajectory Synthesis in 3D Scenes
Mar 18, 2026Synthesizing controllable 6-DOF object manipulation trajectories in 3D environments is essential for enabling robots to interact with complex scenes, yet remains challenging due to the need for accurate spatial reasoning, physical feasibility, and multimodal scene understanding. Existing approaches often rely on 2D or partial 3D representations, limiting their ability to capture full scene geometry and constraining trajectory precision. We present GMT, a multimodal transformer framework that generates realistic and goal-directed object trajectories by jointly leveraging 3D bounding box geometry, point cloud context, semantic object categories, and target end poses. The model represents trajectories as continuous 6-DOF pose sequences and employs a tailored conditioning strategy that fuses geometric, semantic, contextual, and goaloriented information. Extensive experiments on synthetic and real-world benchmarks demonstrate that GMT outperforms state-of-the-art human motion and human-object interaction baselines, such as CHOIS and GIMO, achieving substantial gains in spatial accuracy and orientation control. Our method establishes a new benchmark for learningbased manipulation planning and shows strong generalization to diverse objects and cluttered 3D environments. Project page: https://huajian- zeng.github. io/projects/gmt/.
FlowHOI: Flow-based Semantics-Grounded Generation of Hand-Object Interactions for Dexterous Robot Manipulation
Feb 13, 2026Recent vision-language-action (VLA) models can generate plausible end-effector motions, yet they often fail in long-horizon, contact-rich tasks because the underlying hand-object interaction (HOI) structure is not explicitly represented. An embodiment-agnostic interaction representation that captures this structure would make manipulation behaviors easier to validate and transfer across robots. We propose FlowHOI, a two-stage flow-matching framework that generates semantically grounded, temporally coherent HOI sequences, comprising hand poses, object poses, and hand-object contact states, conditioned on an egocentric observation, a language instruction, and a 3D Gaussian splatting (3DGS) scene reconstruction. We decouple geometry-centric grasping from semantics-centric manipulation, conditioning the latter on compact 3D scene tokens and employing a motion-text alignment loss to semantically ground the generated interactions in both the physical scene layout and the language instruction. To address the scarcity of high-fidelity HOI supervision, we introduce a reconstruction pipeline that recovers aligned hand-object trajectories and meshes from large-scale egocentric videos, yielding an HOI prior for robust generation. Across the GRAB and HOT3D benchmarks, FlowHOI achieves the highest action recognition accuracy and a 1.7$\times$ higher physics simulation success rate than the strongest diffusion-based baseline, while delivering a 40$\times$ inference speedup. We further demonstrate real-robot execution on four dexterous manipulation tasks, illustrating the feasibility of retargeting generated HOI representations to real-robot execution pipelines.
CoE: Deep Coupled Embedding for Non-Rigid Point Cloud Correspondences
Dec 07, 2024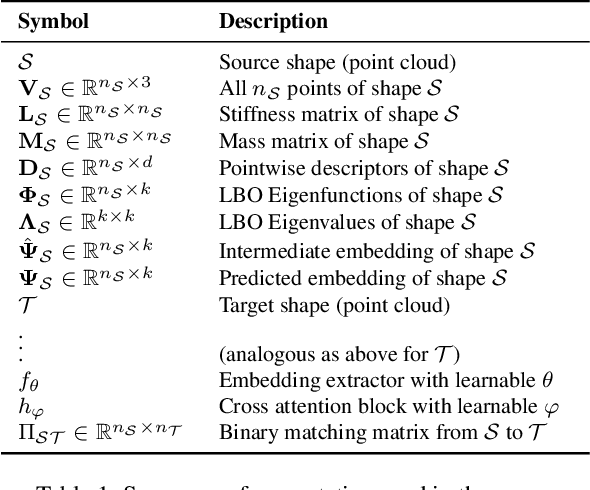
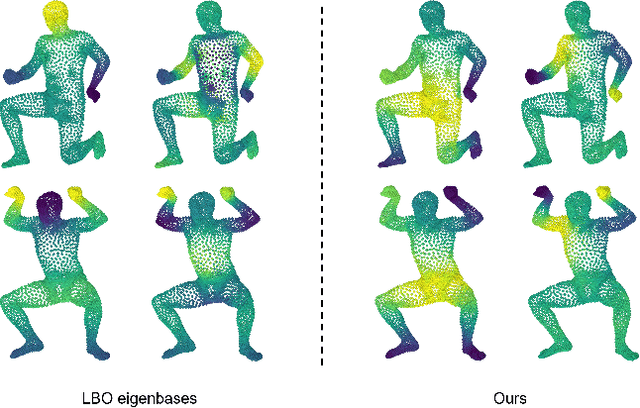

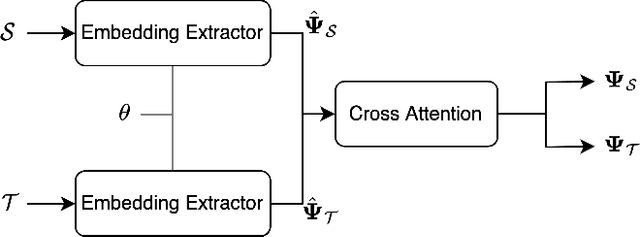
The interest in matching non-rigidly deformed shapes represented as raw point clouds is rising due to the proliferation of low-cost 3D sensors. Yet, the task is challenging since point clouds are irregular and there is a lack of intrinsic shape information. We propose to tackle these challenges by learning a new shape representation -- a per-point high dimensional embedding, in an embedding space where semantically similar points share similar embeddings. The learned embedding has multiple beneficial properties: it is aware of the underlying shape geometry and is robust to shape deformations and various shape artefacts, such as noise and partiality. Consequently, this embedding can be directly employed to retrieve high-quality dense correspondences through a simple nearest neighbor search in the embedding space. Extensive experiments demonstrate new state-of-the-art results and robustness in numerous challenging non-rigid shape matching benchmarks and show its great potential in other shape analysis tasks, such as segmentation.
ClearDepth: Enhanced Stereo Perception of Transparent Objects for Robotic Manipulation
Sep 13, 2024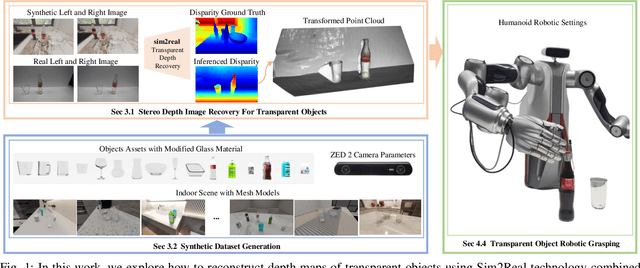
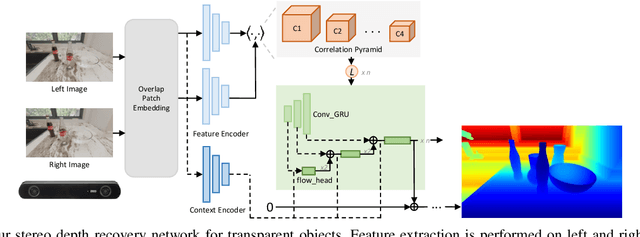
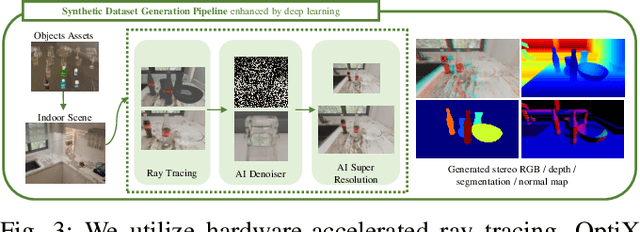
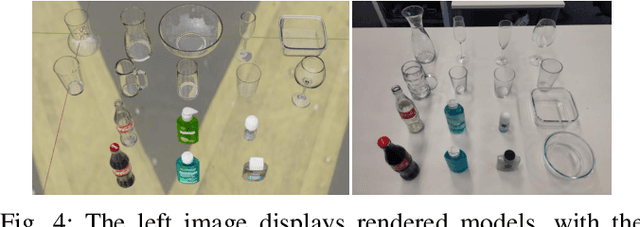
Transparent object depth perception poses a challenge in everyday life and logistics, primarily due to the inability of standard 3D sensors to accurately capture depth on transparent or reflective surfaces. This limitation significantly affects depth map and point cloud-reliant applications, especially in robotic manipulation. We developed a vision transformer-based algorithm for stereo depth recovery of transparent objects. This approach is complemented by an innovative feature post-fusion module, which enhances the accuracy of depth recovery by structural features in images. To address the high costs associated with dataset collection for stereo camera-based perception of transparent objects, our method incorporates a parameter-aligned, domain-adaptive, and physically realistic Sim2Real simulation for efficient data generation, accelerated by AI algorithm. Our experimental results demonstrate the model's exceptional Sim2Real generalizability in real-world scenarios, enabling precise depth mapping of transparent objects to assist in robotic manipulation. Project details are available at https://sites.google.com/view/cleardepth/ .
Arena 3.0: Advancing Social Navigation in Collaborative and Highly Dynamic Environments
Jun 02, 2024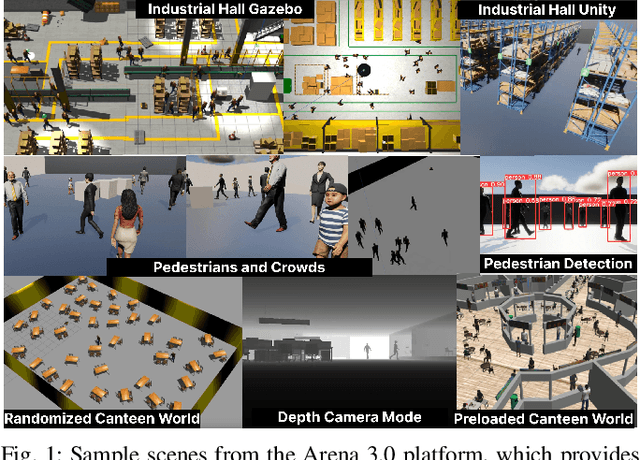
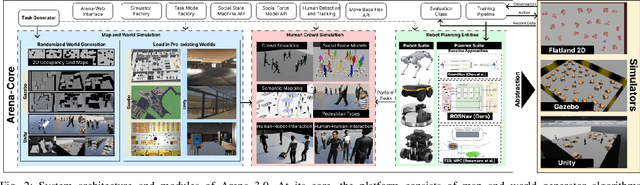


Building upon our previous contributions, this paper introduces Arena 3.0, an extension of Arena-Bench, Arena 1.0, and Arena 2.0. Arena 3.0 is a comprehensive software stack containing multiple modules and simulation environments focusing on the development, simulation, and benchmarking of social navigation approaches in collaborative environments. We significantly enhance the realism of human behavior simulation by incorporating a diverse array of new social force models and interaction patterns, encompassing both human-human and human-robot dynamics. The platform provides a comprehensive set of new task modes, designed for extensive benchmarking and testing and is capable of generating realistic and human-centric environments dynamically, catering to a broad spectrum of social navigation scenarios. In addition, the platform's functionalities have been abstracted across three widely used simulators, each tailored for specific training and testing purposes. The platform's efficacy has been validated through an extensive benchmark and user evaluations of the platform by a global community of researchers and students, which noted the substantial improvement compared to previous versions and expressed interests to utilize the platform for future research and development. Arena 3.0 is openly available at https://github.com/Arena-Rosnav.
* 11 pages, 6 figures
Arena-Rosnav 2.0: A Development and Benchmarking Platform for Robot Navigation in Highly Dynamic Environments
Feb 20, 2023Following up on our previous works, in this paper, we present Arena-Rosnav 2.0 an extension to our previous works Arena-Bench and Arena-Rosnav, which adds a variety of additional modules for developing and benchmarking robotic navigation approaches. The platform is fundamentally restructured and provides unified APIs to add additional functionalities such as planning algorithms, simulators, or evaluation functionalities. We have included more realistic simulation and pedestrian behavior and provide a profound documentation to lower the entry barrier. We evaluated our system by first, conducting a user study in which we asked experienced researchers as well as new practitioners and students to test our system. The feedback was mostly positive and a high number of participants are utilizing our system for other research endeavors. Finally, we demonstrate the feasibility of our system by integrating two new simulators and a variety of state of the art navigation approaches and benchmark them against one another. The platform is openly available at https://github.com/Arena-Rosnav.