 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOctopus-Swimming-Like Robot with Soft Asymmetric Arms
Oct 15, 2024



Underwater vehicles have seen significant development over the past seventy years. However, bio-inspired propulsion robots are still in their early stages and require greater interdisciplinary collaboration between biologists and roboticists. The octopus, one of the most intelligent marine animals, exhibits remarkable abilities such as camouflaging, exploring, and hunting while swimming with its arms. Although bio-inspired robotics researchers have aimed to replicate these abilities, the complexity of designing an eight-arm bionic swimming platform has posed challenges from the beginning. In this work, we propose a novel bionic robot swimming platform that combines asymmetric passive morphing arms with an umbrella-like quick-return mechanism. Using only two simple constant-speed motors, this design achieves efficient swimming by replicating octopus-like arm movements and stroke time ratios. The robot reached a peak speed of 314 mm/s during its second power stroke. This design reduces the complexity of traditional octopus-like swimming robot actuation systems while maintaining good swimming performance. It offers a more achievable and efficient platform for biologists and roboticists conducting more profound octopus-inspired robotic and biological studies.
Causal Mechanism Transfer Network for Time Series Domain Adaptation in Mechanical Systems
Oct 13, 2019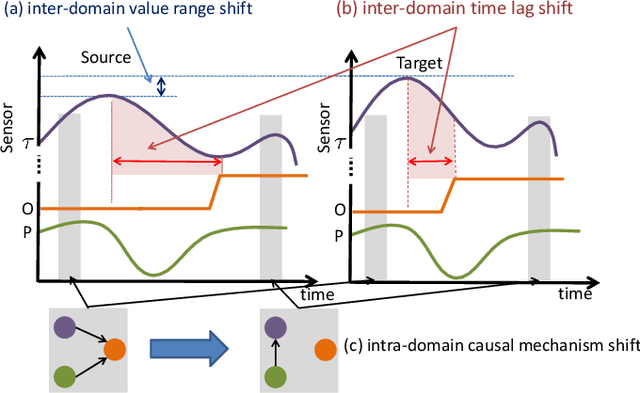
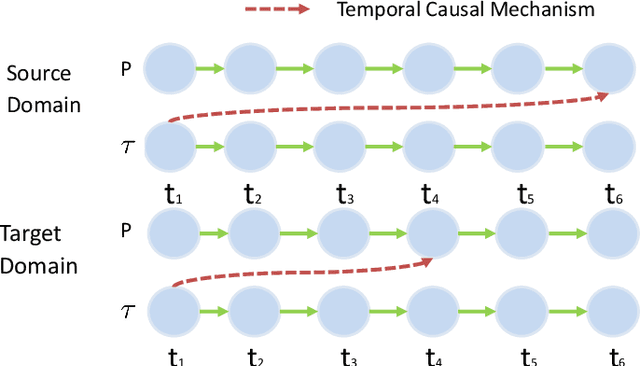
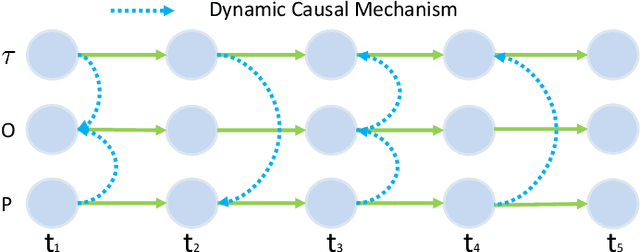
Data-driven models are becoming essential parts in modern mechanical systems, commonly used to capture the behavior of various equipment and varying environmental characteristics. Despite the advantages of these data-driven models on excellent adaptivity to high dynamics and aging equipment, they are usually hungry to massive labels over historical data, mostly contributed by human engineers at an extremely high cost. The label demand is now the major limiting factor to modeling accuracy, hindering the fulfillment of visions for applications. Fortunately, domain adaptation enhances the model generalization by utilizing the labelled source data as well as the unlabelled target data and then we can reuse the model on different domains. However, the mainstream domain adaptation methods cannot achieve ideal performance on time series data, because most of them focus on static samples and even the existing time series domain adaptation methods ignore the properties of time series data, such as temporal causal mechanism. In this paper, we assume that causal mechanism is invariant and present our Causal Mechanism Transfer Network(CMTN) for time series domain adaptation. By capturing and transferring the dynamic and temporal causal mechanism of multivariate time series data and alleviating the time lags and different value ranges among different machines, CMTN allows the data-driven models to exploit existing data and labels from similar systems, such that the resulting model on a new system is highly reliable even with very limited data. We report our empirical results and lessons learned from two real-world case studies, on chiller plant energy optimization and boiler fault detection, which outperforms the existing state-of-the-art method.
Variable-Length Hashing
Mar 17, 2016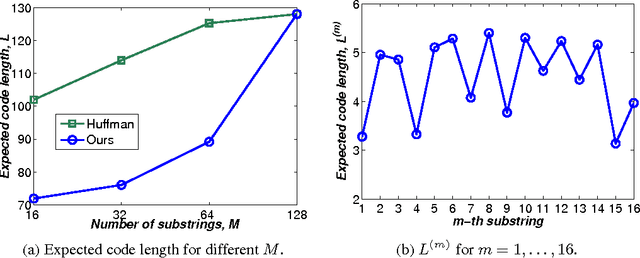



Hashing has emerged as a popular technique for large-scale similarity search. Most learning-based hashing methods generate compact yet correlated hash codes. However, this redundancy is storage-inefficient. Hence we propose a lossless variable-length hashing (VLH) method that is both storage- and search-efficient. Storage efficiency is achieved by converting the fixed-length hash code into a variable-length code. Search efficiency is obtained by using a multiple hash table structure. With VLH, we are able to deliberately add redundancy into hash codes to improve retrieval performance with little sacrifice in storage efficiency or search complexity. In particular, we propose a block K-means hashing (B-KMH) method to obtain significantly improved retrieval performance with no increase in storage and marginal increase in computational cost.