 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSURENA IV: Towards A Cost-effective Full-size Humanoid Robot for Real-world Scenarios
Aug 30, 2021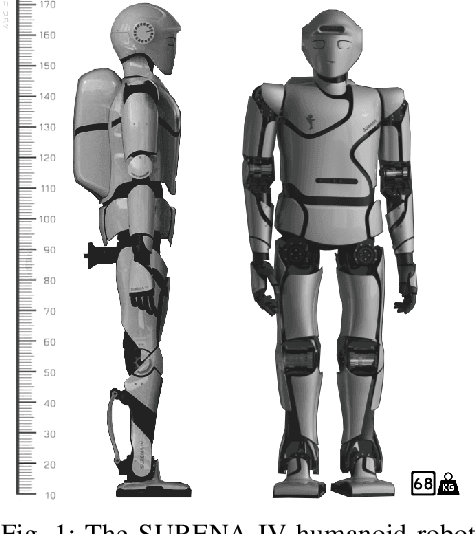
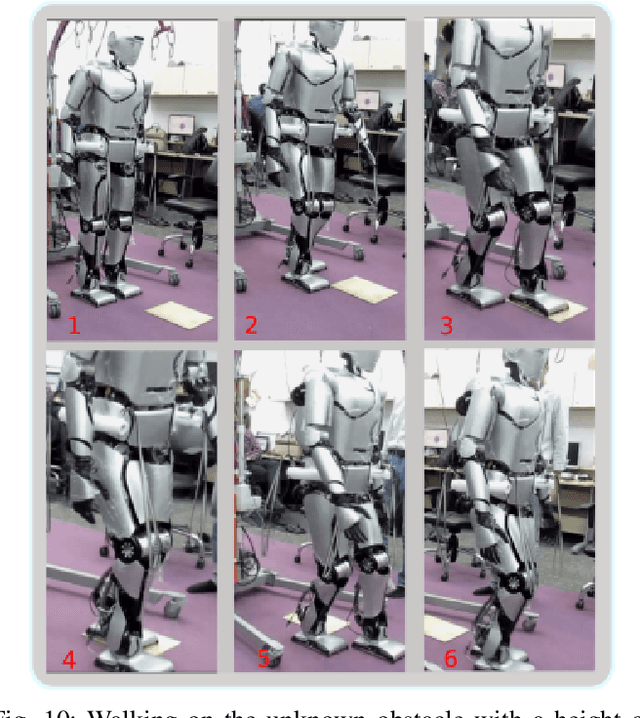

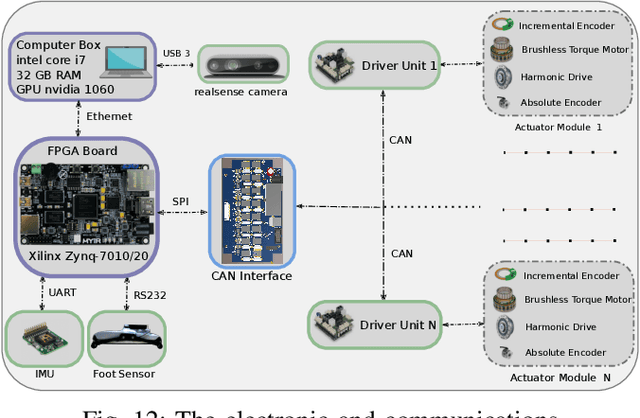
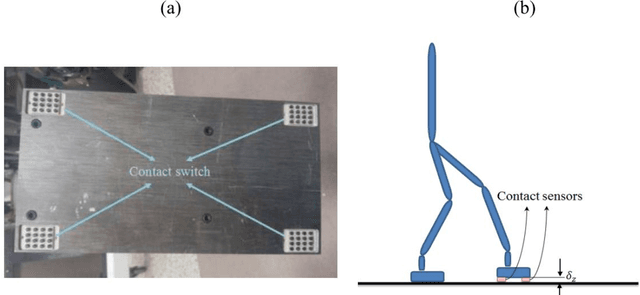
This paper describes the hardware, software framework, and experimental testing of SURENA IV humanoid robotics platform. SURENA IV has 43 degrees of freedom (DoFs), including seven DoFs for each arm, six DoFs for each hand, and six DoFs for each leg, with a height of 170 cm and a mass of 68 kg and morphological and mass properties similar to an average adult human. SURENA IV aims to realize a cost-effective and anthropomorphic humanoid robot for real-world scenarios. In this way, we demonstrate a locomotion framework based on a novel and inexpensive predictive foot sensor that enables walking with 7cm foot position error because of accumulative error of links and connections' deflection(that has been manufactured by the tools which are available in the Universities). Thanks to this sensor, the robot can walk on unknown obstacles without any force feedback, by online adaptation of foot height and orientation. Moreover, the arm and hand of the robot have been designed to grasp the objects with different stiffness and geometries that enable the robot to do drilling, visual servoing of a moving object, and writing his name on the white-board.
Push Recovery of a Position-Controlled Humanoid Robot Based on Capture Point Feedback Control
Oct 29, 2017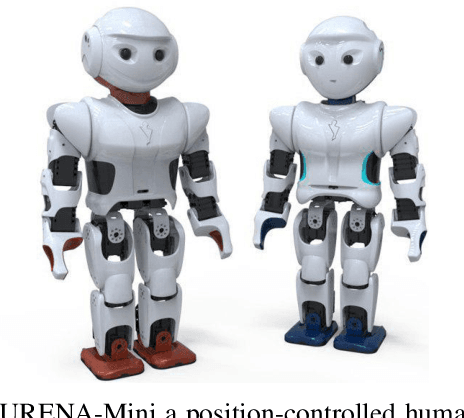
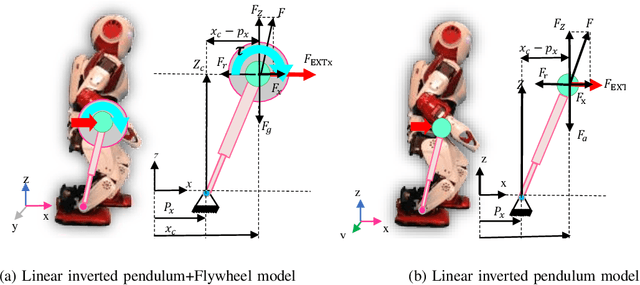
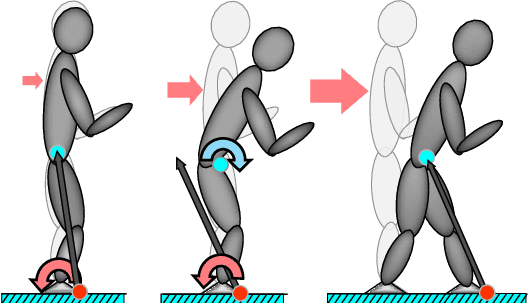

In this paper, a combination of ankle and hip strategy is used for push recovery of a position-controlled humanoid robot. Ankle strategy and hip strategy are equivalent to Center of Pressure (CoP) and Centroidal Moment Pivot (CMP) regulation respectively. For controlling the CMP and CoP we need a torque-controlled robot, however most of the conventional humanoid robots are position controlled. In this regard, we present an efficient way for implementation of the hip and ankle strategies on a position controlled humanoid robot. We employ a feedback controller to compensate the capture point error. Using our scheme, a simple and practical push recovery controller is designed which can be implemented on the most of the conventional humanoid robots without the need for torque sensors. The effectiveness of the proposed approach is verified through push recovery experiments on SURENA-Mini humanoid robot under severe pushes.
Online Adaptation for Humanoids Walking On Uncertain Surfaces
Mar 30, 2017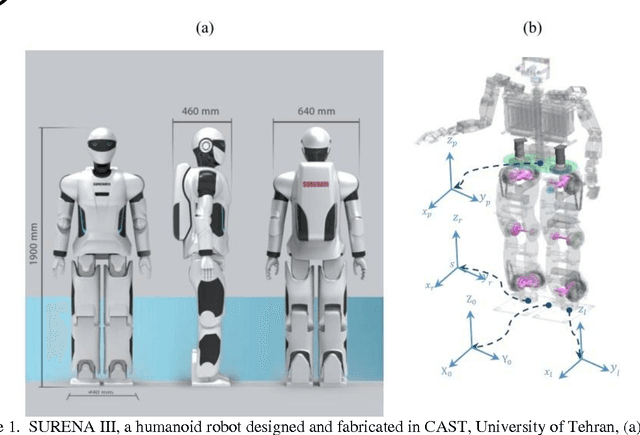
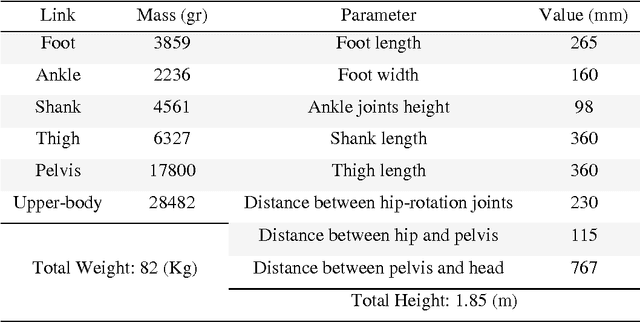
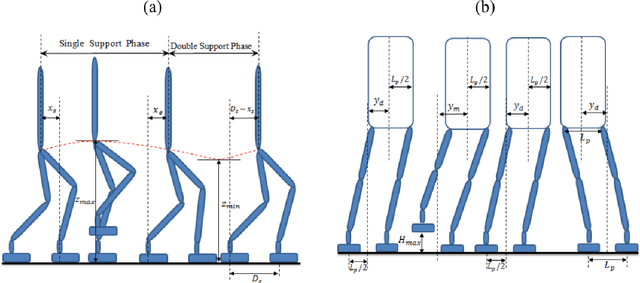
In this paper, an online adaptation algorithm for bipedal walking on uneven surfaces with height uncertainty is proposed. In order to generate walking patterns on flat terrains, the trajectories in the task space are planned to satisfy the dynamic balance and slippage avoidance constraints, and also to guarantee smooth landing of the swing foot. To ensure smooth landing of the swing foot on surfaces with height uncertainty, the preplanned trajectories in the task space should be adapted. The proposed adaptation algorithm consists of two stages. In the first stage, once the swing foot reaches its maximum height, the supervisory control is initiated until the touch is detected. After the detection, the trajectories in the task space are modified to guarantee smooth landing. In the second stage, this modification is preserved during the Double Support Phase (DSP), and released in the next Single Support Phase (SSP). Effectiveness of the proposed online adaptation algorithm is experimentally verified through realization of the walking patterns on the SURENA III humanoid robot, designed and fabricated at CAST. The walking is tested on a surface with various flat obstacles, where the swing foot is prone to either land on the ground soon or late.