 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIranian License Plate Recognition Using a Reliable Deep Learning Approach
May 03, 2023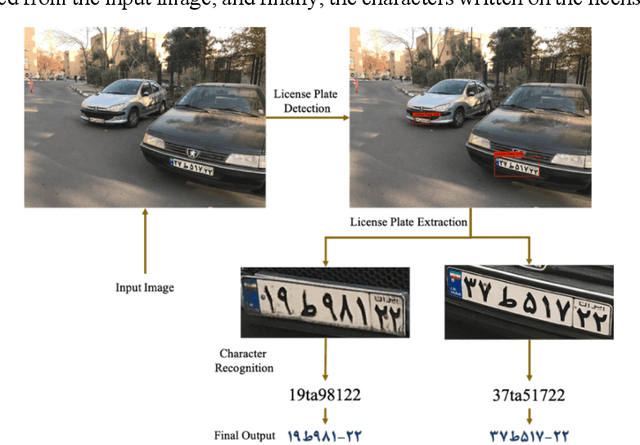
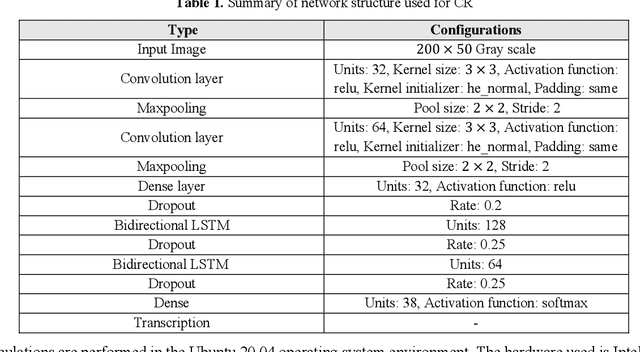
The issue of Automatic License Plate Recognition (ALPR) has been one of the most challenging issues in recent years. Weather conditions, camera angle of view, lighting conditions, different characters written on license plates, and many other factors are among the challenges for the issue of ALPR. Given the advances that have been made in recent years in the field of deep neural networks, some types of neural networks and models based on them can be used to perform the task of Iranian license plate recognition. In the proposed method presented in this paper, the license plate recognition is done in two steps. The first step is to detect the rectangles of the license plates from the input image. In the second step, these license plates are cropped from the image and their characters are recognized. For the first step, 3065 images including license plates and for the second step, 3364 images including characters of license plates have been prepared and considered as the desired datasets. In the first step, license plates are detected using the YOLOv4-tiny model, which is based on Convolutional Neural Network (CNN). In the next step, the characters of these license plates are recognized using Convolutional Recurrent Neural Network (CRNN), and Connectionist Temporal Classification (CTC). In the second step, there is no need to segment and label the characters separately, only one string of numbers and letters is enough for the labels.
Wearing face mask detection using deep learning through COVID-19 pandemic
Apr 28, 2023



During the COVID-19 pandemic, wearing a face mask has been known to be an effective way to prevent the spread of COVID-19. In lots of monitoring tasks, humans have been replaced with computers thanks to the outstanding performance of the deep learning models. Monitoring the wearing of a face mask is another task that can be done by deep learning models with acceptable accuracy. The main challenge of this task is the limited amount of data because of the quarantine. In this paper, we did an investigation on the capability of three state-of-the-art object detection neural networks on face mask detection for real-time applications. As mentioned, here are three models used, Single Shot Detector (SSD), two versions of You Only Look Once (YOLO) i.e., YOLOv4-tiny, and YOLOv4-tiny-3l from which the best was selected. In the proposed method, according to the performance of different models, the best model that can be suitable for use in real-world and mobile device applications in comparison to other recent studies was the YOLOv4-tiny model, with 85.31% and 50.66 for mean Average Precision (mAP) and Frames Per Second (FPS), respectively. These acceptable values were achieved using two datasets with only 1531 images in three separate classes.
Rigid vs compliant contact: An experimental study on biped walking
Dec 13, 2018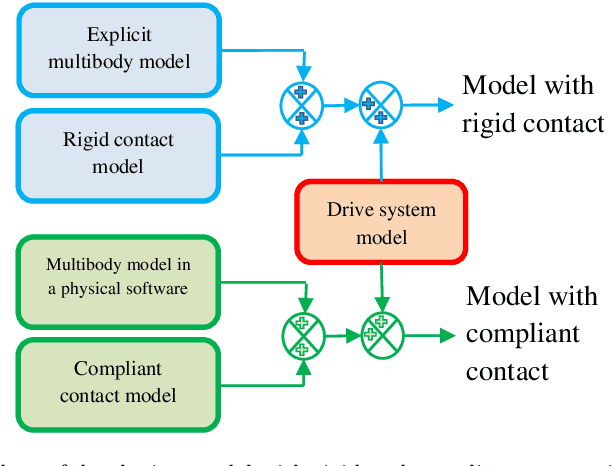


Contact modeling plays a central role in motion planning, simulation, and control of legged robots, as legged locomotion is realized through contact. The two prevailing approaches to model the contact consider rigid and compliant premise at interaction ports. Contrary to the dynamics model of legged systems with rigid contact (without impact) which is straightforward to develop, there is no consensus among researchers to employ a standard compliant contact model. Our main goal in this paper is to study the dynamics model structure of bipedal walking systems with a rigid contact and a \textit{novel} compliant contact model and to present experimental validation of both models. For the model with rigid contact, after developing the model of the articulated bodies in flight phase without any contact with the environment, we apply the holonomic constraints at contact points and develop a constrained dynamics model of the robot in both single and double support phases. For the model with compliant contact, we propose a novel nonlinear contact model and simulate the motion of the robot using this model. In order to show the performance of the developed models, we compare obtained results from these models to the empirical measurements from bipedal walking of the human-sized humanoid robot SURENA III, which has been designed and fabricated at CAST, University of Tehran. This analysis shows the merit of both models in estimating dynamic behavior of the robot walking on a semi-rigid surface. The model with rigid contact, which is less complex and independent of the physical properties of the contacting bodies, can be employed for model-based motion optimization, analysis as well as control, while the model with compliant contact and more complexity is suitable for more realistic simulation scenarios.
Online Adaptation for Humanoids Walking On Uncertain Surfaces
Mar 30, 2017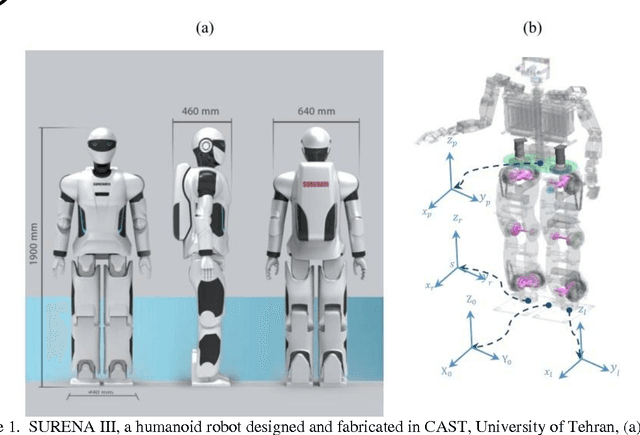
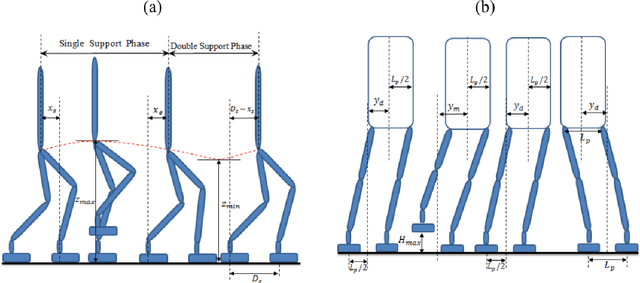
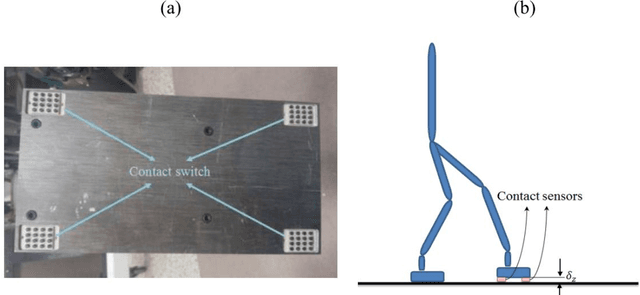
In this paper, an online adaptation algorithm for bipedal walking on uneven surfaces with height uncertainty is proposed. In order to generate walking patterns on flat terrains, the trajectories in the task space are planned to satisfy the dynamic balance and slippage avoidance constraints, and also to guarantee smooth landing of the swing foot. To ensure smooth landing of the swing foot on surfaces with height uncertainty, the preplanned trajectories in the task space should be adapted. The proposed adaptation algorithm consists of two stages. In the first stage, once the swing foot reaches its maximum height, the supervisory control is initiated until the touch is detected. After the detection, the trajectories in the task space are modified to guarantee smooth landing. In the second stage, this modification is preserved during the Double Support Phase (DSP), and released in the next Single Support Phase (SSP). Effectiveness of the proposed online adaptation algorithm is experimentally verified through realization of the walking patterns on the SURENA III humanoid robot, designed and fabricated at CAST. The walking is tested on a surface with various flat obstacles, where the swing foot is prone to either land on the ground soon or late.