 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Adaptation for Humanoids Walking On Uncertain Surfaces
Mar 30, 2017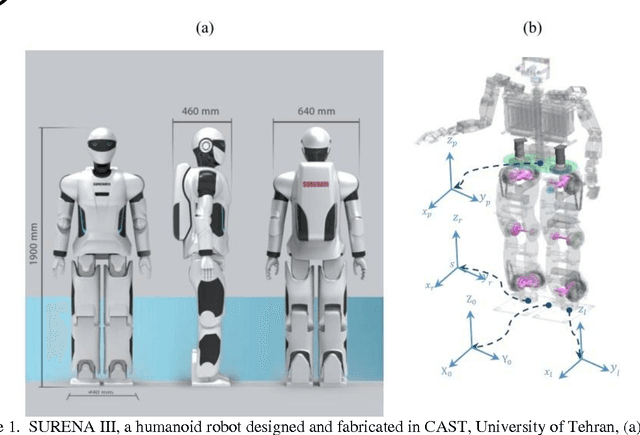
In this paper, an online adaptation algorithm for bipedal walking on uneven surfaces with height uncertainty is proposed. In order to generate walking patterns on flat terrains, the trajectories in the task space are planned to satisfy the dynamic balance and slippage avoidance constraints, and also to guarantee smooth landing of the swing foot. To ensure smooth landing of the swing foot on surfaces with height uncertainty, the preplanned trajectories in the task space should be adapted. The proposed adaptation algorithm consists of two stages. In the first stage, once the swing foot reaches its maximum height, the supervisory control is initiated until the touch is detected. After the detection, the trajectories in the task space are modified to guarantee smooth landing. In the second stage, this modification is preserved during the Double Support Phase (DSP), and released in the next Single Support Phase (SSP). Effectiveness of the proposed online adaptation algorithm is experimentally verified through realization of the walking patterns on the SURENA III humanoid robot, designed and fabricated at CAST. The walking is tested on a surface with various flat obstacles, where the swing foot is prone to either land on the ground soon or late.
Step Timing Adjustment: A Step toward Generating Robust Gaits
Dec 12, 2016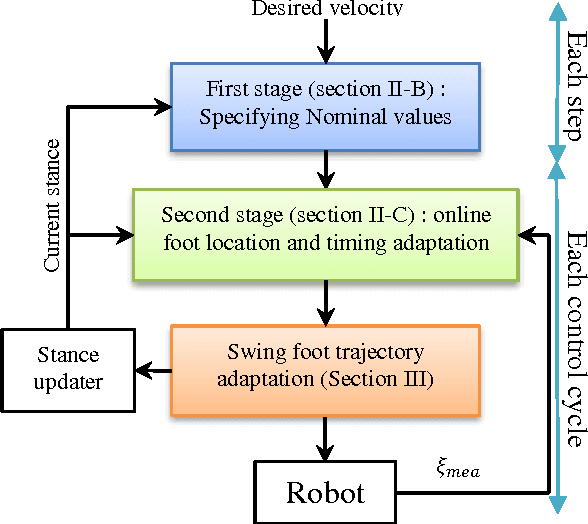
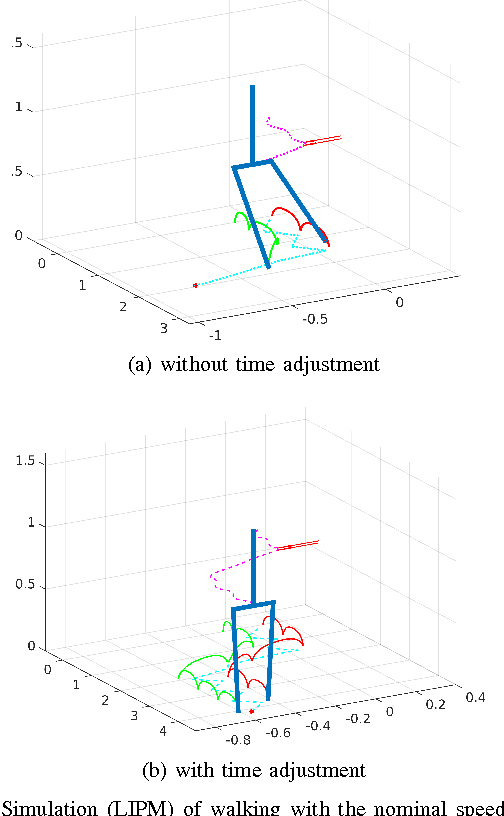
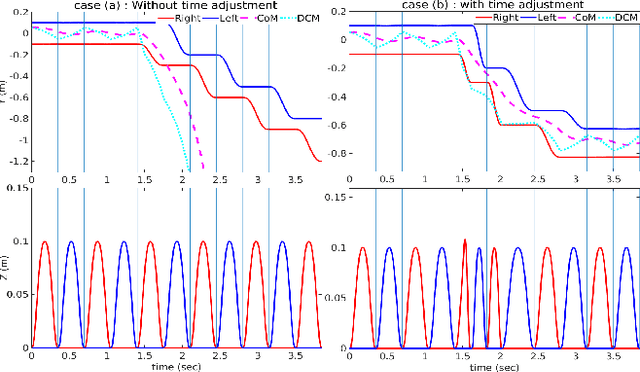
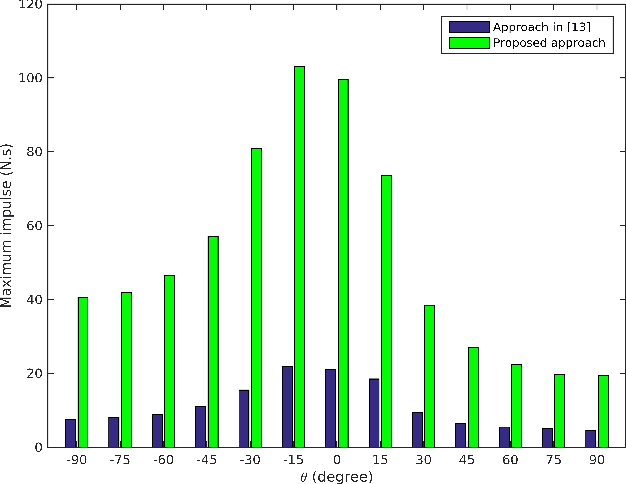
Step adjustment for humanoid robots has been shown to improve robustness in gaits. However, step duration adaptation is often neglected in control strategies. In this paper, we propose an approach that combines both step location and timing adjustment for generating robust gaits. In this approach, step location and step timing are decided, based on feedback from the current state of the robot. The proposed approach is comprised of two stages. In the first stage, the nominal step location and step duration for the next step or a previewed number of steps are specified. In this stage which is done at the start of each step, the main goal is to specify the best step length and step duration for a desired walking speed. The second stage deals with finding the best landing point and landing time of the swing foot at each control cycle. In this stage, stability of the gaits is preserved by specifying a desired offset between the swing foot landing point and the Divergent Component of Motion (DCM) at the end of current step. After specifying the landing point of the swing foot at a desired time, the swing foot trajectory is regenerated at each control cycle to realize desired landing properties. Simulation on different scenarios shows the robustness of the generated gaits from our proposed approach compared to the case where no timing adjustment is employed.
Stepping Stabilization Using a Combination of DCM Tracking and Step Adjustment
Sep 30, 2016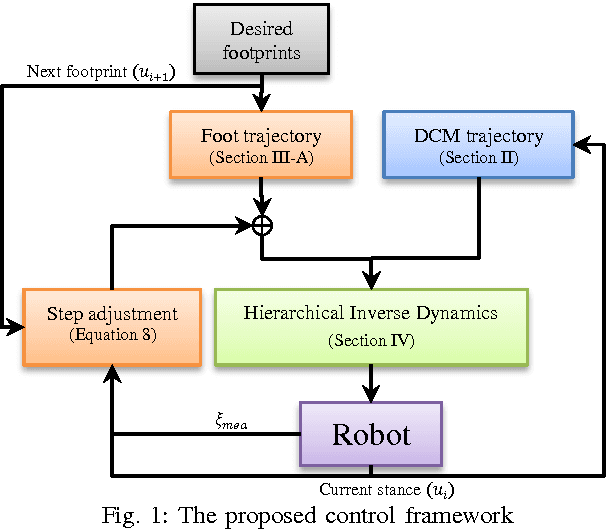
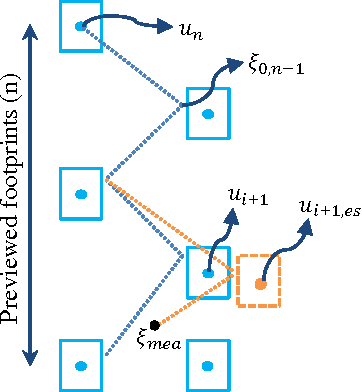
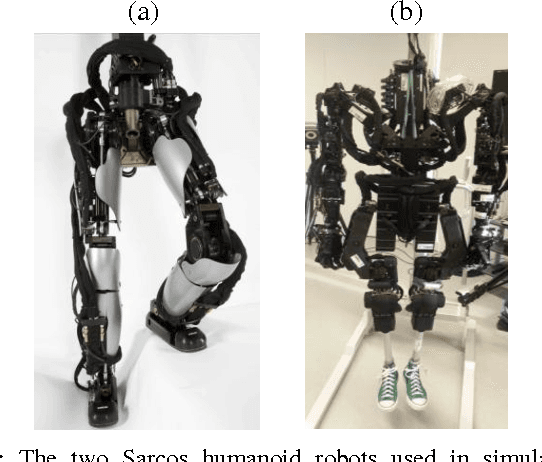

In this paper, a method for stabilizing biped robots stepping by a combination of Divergent Component of Motion (DCM) tracking and step adjustment is proposed. In this method, the DCM trajectory is generated, consistent with the predefined footprints. Furthermore, a swing foot trajectory modification strategy is proposed to adapt the landing point, using DCM measurement. In order to apply the generated trajectories to the full robot, a Hierarchical Inverse Dynamics (HID) is employed. The HID enables us to use different combinations of the DCM tracking and step adjustment for stabilizing different biped robots. Simulation experiments on two scenarios for two different simulated robots, one with active ankles and the other with passive ankles, are carried out. Simulation results demonstrate the effectiveness of the proposed method for robots with both active and passive ankles.