 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStepping Stabilization Using a Combination of DCM Tracking and Step Adjustment
Sep 30, 2016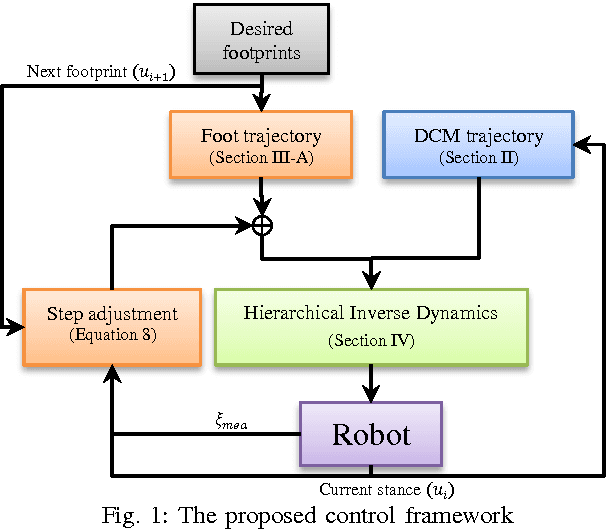
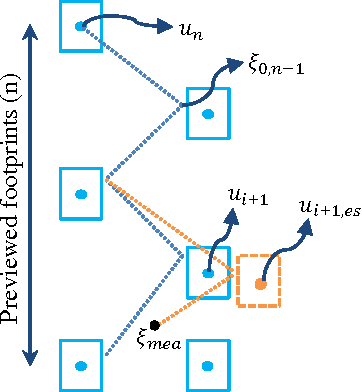
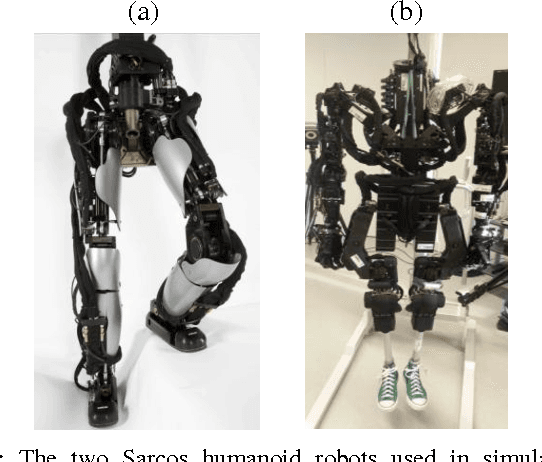

In this paper, a method for stabilizing biped robots stepping by a combination of Divergent Component of Motion (DCM) tracking and step adjustment is proposed. In this method, the DCM trajectory is generated, consistent with the predefined footprints. Furthermore, a swing foot trajectory modification strategy is proposed to adapt the landing point, using DCM measurement. In order to apply the generated trajectories to the full robot, a Hierarchical Inverse Dynamics (HID) is employed. The HID enables us to use different combinations of the DCM tracking and step adjustment for stabilizing different biped robots. Simulation experiments on two scenarios for two different simulated robots, one with active ankles and the other with passive ankles, are carried out. Simulation results demonstrate the effectiveness of the proposed method for robots with both active and passive ankles.