 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAVI: A Research Platform for Telepresence and Teleoperation
May 23, 2018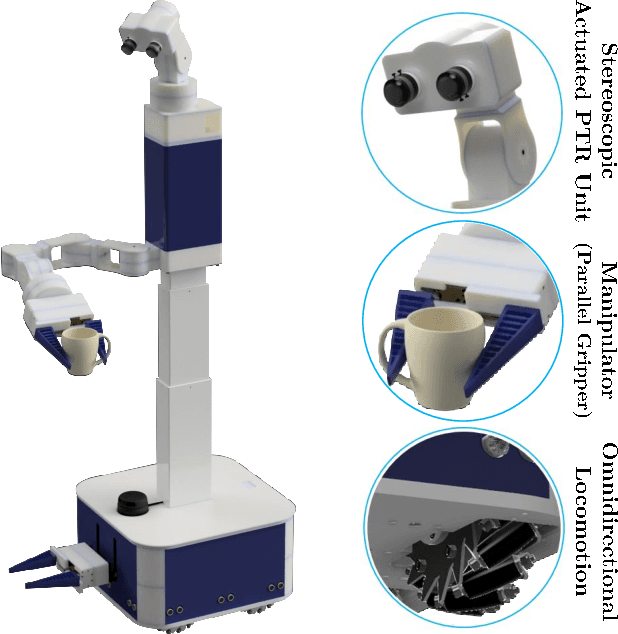
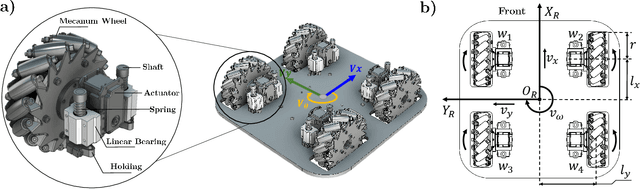
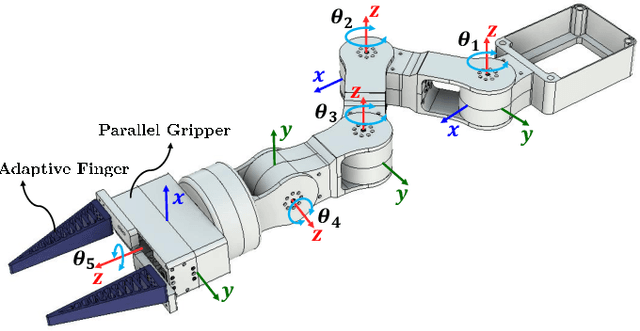

One of the goals in telepresence is to be able to perform daily tasks remotely. A key requirement for this is a robust and reliable mobile robotic platform. Ideally, such a platform should support 360-degree stereoscopic vision and semi-autonomous telemanipulation ability. In this technical report, we present our latest work on designing the telepresence mobile robot platform called MAVI. MAVI is a low-cost and robust but extendable platform for research and educational purpose, especially for machine vision and human interaction in telepresence setups. The MAVI platform offers a balance between modularity, capabilities, accessibility, cost and an open source software framework. With a range of different sensors such as Inertial Measurement Unit (IMU), 360-degree laser rangefinder, ultrasonic proximity sensors, and force sensors along with smart actuation in omnidirectional holonomic locomotion, high load cylindrical manipulator, and actuated stereoscopic Pan-Tilt-Roll Unit (PTRU), not only MAVI can provide the basic feedbacks from its surroundings, but also can interact within the remote environment in multiple ways. The software architecture of MAVI is based on the Robot Operating System (ROS) which allows for the easy integration of the state-of-the-art software packages.
Push Recovery of a Position-Controlled Humanoid Robot Based on Capture Point Feedback Control
Oct 29, 2017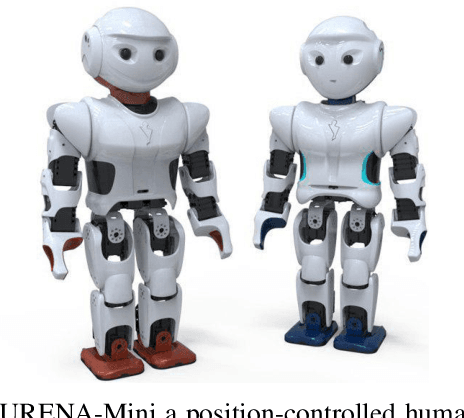
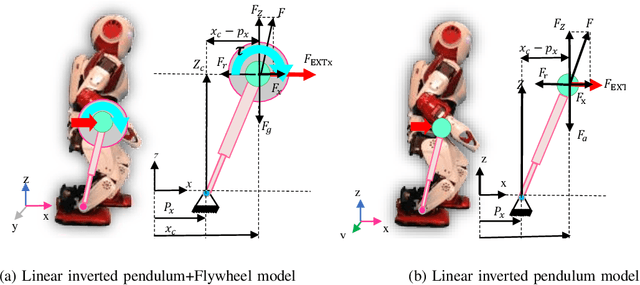
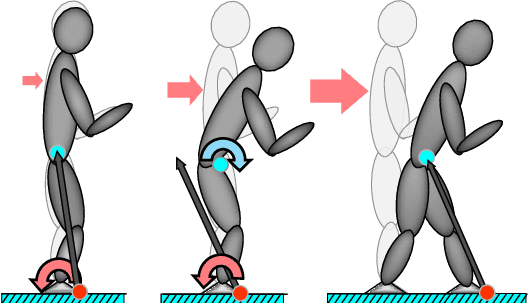

In this paper, a combination of ankle and hip strategy is used for push recovery of a position-controlled humanoid robot. Ankle strategy and hip strategy are equivalent to Center of Pressure (CoP) and Centroidal Moment Pivot (CMP) regulation respectively. For controlling the CMP and CoP we need a torque-controlled robot, however most of the conventional humanoid robots are position controlled. In this regard, we present an efficient way for implementation of the hip and ankle strategies on a position controlled humanoid robot. We employ a feedback controller to compensate the capture point error. Using our scheme, a simple and practical push recovery controller is designed which can be implemented on the most of the conventional humanoid robots without the need for torque sensors. The effectiveness of the proposed approach is verified through push recovery experiments on SURENA-Mini humanoid robot under severe pushes.