 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling Acoustic Audience Feedback in Large Virtual Events
Oct 27, 2023

The COVID-19 pandemic shifted many events in our daily lives into the virtual domain. While virtual conference systems provide an alternative to physical meetings, larger events require a muted audience to avoid an accumulation of background noise and distorted audio. However, performing artists strongly rely on the feedback of their audience. We propose a concept for a virtual audience framework which supports all participants with the ambience of a real audience. Audience feedback is collected locally, allowing users to express enthusiasm or discontent by selecting means such as clapping, whistling, booing, and laughter. This feedback is sent as abstract information to a virtual audience server. We broadcast the combined virtual audience feedback information to all participants, which can be synthesized as a single acoustic feedback by the client. The synthesis can be done by turning the collective audience feedback into a prompt that is fed to state-of-the-art models such as AudioGen. This way, each user hears a single acoustic feedback sound of the entire virtual event, without requiring to unmute or risk hearing distorted, unsynchronized feedback.
Non-Planar Frictional Surface Contacts: Modeling and Application to Grasping
Sep 15, 2019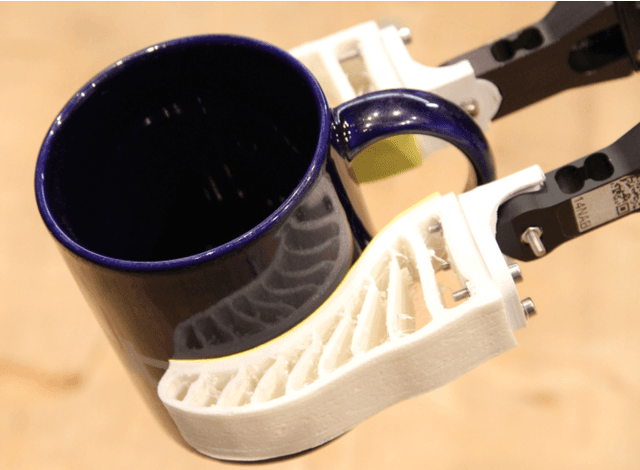



Contact modeling is essential for robotic grasping and manipulation. The relation between friction and relative body motion is fundamental for controlled pushing. An accurate friction model is indispensable for grasp analysis as the stability heavily relies on friction. To increase the grasp stability, soft fingers are widely deployed for manipulation tasks as they adapt to the object geometry, where the deformability results in a curved contact area. The friction of such curved surfaces is in six dimensions and its model is yet not well defined. To address this issue, we derive the friction computation for curved surfaces by combining concepts of differential geometry and Coulomb friction law. We further generalize two classical limit surface models from three to six dimensions, which describe the friction-motion constraints for a single contact. To analyze multi contacts for grasping, we build the grasp wrench space by merging the normal wrench and the fitted limit surfaces of each contact. The performance of the two limit surface models is evaluated with six parametric surfaces and 2473 meshed contacts obtained from simulations using the finite element method. Results indicate that the proposed models yield 1.81% fitting error of the 6D friction wrench samples. We demonstrate the applicability of the proposed models to predict grasp success for a parallel-jaw gripper. Robotic experiments suggest that a prediction accuracy of up to 92.6% can be achieved with the presented frictional contact modeling.
MAVI: A Research Platform for Telepresence and Teleoperation
May 23, 2018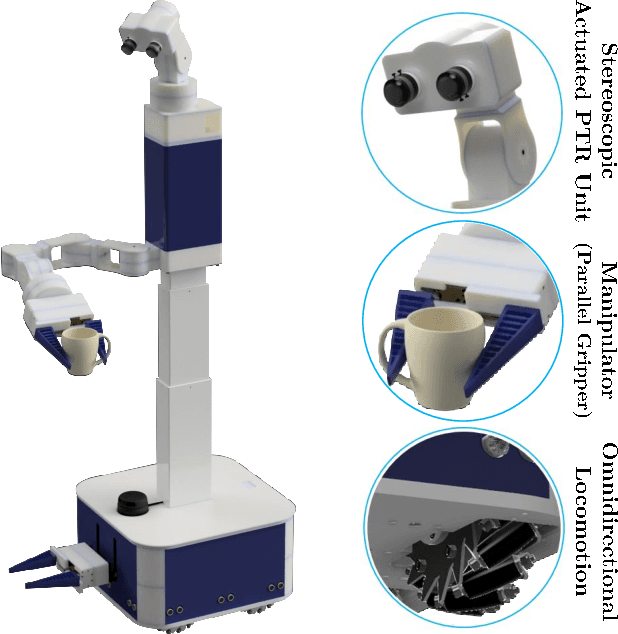
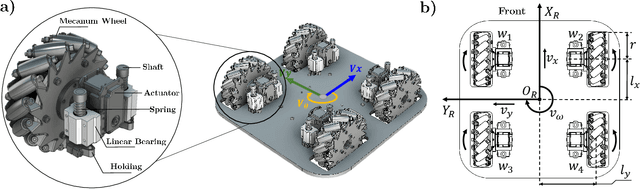
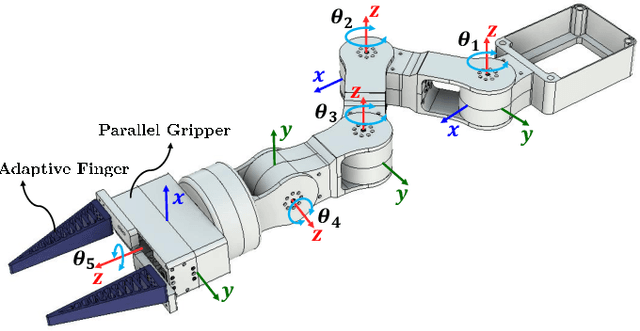

One of the goals in telepresence is to be able to perform daily tasks remotely. A key requirement for this is a robust and reliable mobile robotic platform. Ideally, such a platform should support 360-degree stereoscopic vision and semi-autonomous telemanipulation ability. In this technical report, we present our latest work on designing the telepresence mobile robot platform called MAVI. MAVI is a low-cost and robust but extendable platform for research and educational purpose, especially for machine vision and human interaction in telepresence setups. The MAVI platform offers a balance between modularity, capabilities, accessibility, cost and an open source software framework. With a range of different sensors such as Inertial Measurement Unit (IMU), 360-degree laser rangefinder, ultrasonic proximity sensors, and force sensors along with smart actuation in omnidirectional holonomic locomotion, high load cylindrical manipulator, and actuated stereoscopic Pan-Tilt-Roll Unit (PTRU), not only MAVI can provide the basic feedbacks from its surroundings, but also can interact within the remote environment in multiple ways. The software architecture of MAVI is based on the Robot Operating System (ROS) which allows for the easy integration of the state-of-the-art software packages.