 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePush Recovery of a Position-Controlled Humanoid Robot Based on Capture Point Feedback Control
Oct 29, 2017
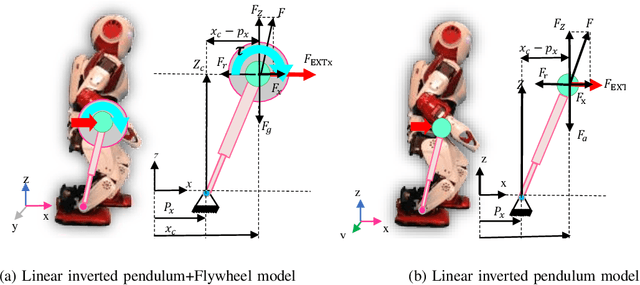
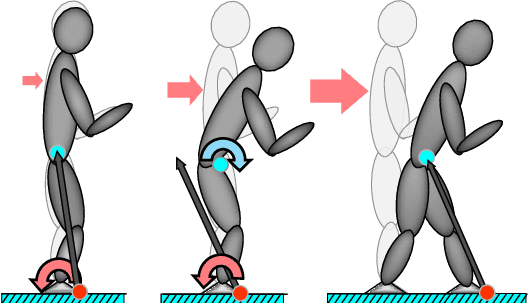

In this paper, a combination of ankle and hip strategy is used for push recovery of a position-controlled humanoid robot. Ankle strategy and hip strategy are equivalent to Center of Pressure (CoP) and Centroidal Moment Pivot (CMP) regulation respectively. For controlling the CMP and CoP we need a torque-controlled robot, however most of the conventional humanoid robots are position controlled. In this regard, we present an efficient way for implementation of the hip and ankle strategies on a position controlled humanoid robot. We employ a feedback controller to compensate the capture point error. Using our scheme, a simple and practical push recovery controller is designed which can be implemented on the most of the conventional humanoid robots without the need for torque sensors. The effectiveness of the proposed approach is verified through push recovery experiments on SURENA-Mini humanoid robot under severe pushes.
Robust Bipedal Locomotion Control Based on Model Predictive Control and Divergent Component of Motion
Feb 28, 2017



In this paper, previous works on the Model Predictive Control (MPC) and the Divergent Component of Motion (DCM) for bipedal walking control are extended. To this end, we employ a single MPC which uses a combination of Center of Pressure (CoP) manipulation, step adjustment, and Centroidal Moment Pivot (CMP) modulation to design a robust walking controller. Furthermore, we exploit the concept of time-varying DCM to generalize our walking controller for walking in uneven surfaces. Using our scheme, a general and robust walking controller is designed which can be implemented on robots with different control authorities, for walking on various environments, e.g. uneven terrains or surfaces with a very limited feasible area for stepping. The effectiveness of the proposed approach is verified through simulations on different scenarios and comparison to the state of the art.
Push Recovery of a Humanoid Robot Based on Model Predictive Control and Capture Point
Dec 23, 2016



The three bio-inspired strategies that have been used for balance recovery of biped robots are the ankle, hip and stepping Strategies. However, there are several cases for a biped robot where stepping is not possible, e. g. when the available contact surfaces are limited. In this situation, the balance recovery by modulating the angular momentum of the upper body (Hip-strategy) or the Zero Moment Point (ZMP) (Ankle strategy) is essential. In this paper, a single Model Predictive Control (MPC) scheme is employed for controlling the Capture Point (CP) to a desired position by modulating both the ZMP and the Centroidal Moment Pivot (CMP). The goal of the proposed controller is to control the CP, employing the CMP when the CP is out of the support polygon, and/or the ZMP when the CP is inside the support polygon. The proposed algorithm is implemented on an abstract model of the SURENA III humanoid robot. Obtained results show the effectiveness of the proposed approach in the presence of severe pushes, even when the support polygon is shrunken to a point or a line.
Kinematic analysis of a 3-UPU parallel Robot using the Ostrowski-Homotopy Continuation
Sep 28, 2016



The direct kinematics analysis is the foundation of implementation of real world application of parallel manipulators. For most parallel manipulators the direct kinematics is challenging. In this paper, for the first time a fast and efficient Homotopy Continuation Method, called the Ostrowski Homotopy continuation method has been implemented to solve the direct and inverse kinematics problem of the parallel manipulators. This method has advantage over conventional numerical iteration methods, which is not rely on the initial values and is more efficient than other continuation method and it can find all solutions of equations without divergence just by changing auxiliary Homotopy function. Numerical example and simulation was done to solve the direct kinematic problem of the 3-UPU parallel manipulator that leads to 16 real solutions. Results obviously reveal the fastness and effectiveness of this method than the conventional Homotopy continuation methods such as Newton Homotopy. The results shows that the Ostrowski-Homotopy reduces computation time up to 80-97 % with more accuracy in solutions in comparison with the Newton Homotopy.