 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurena-V: A Humanoid Robot for Human-Robot Collaboration with Optimization-based Control Architecture
Jan 28, 2025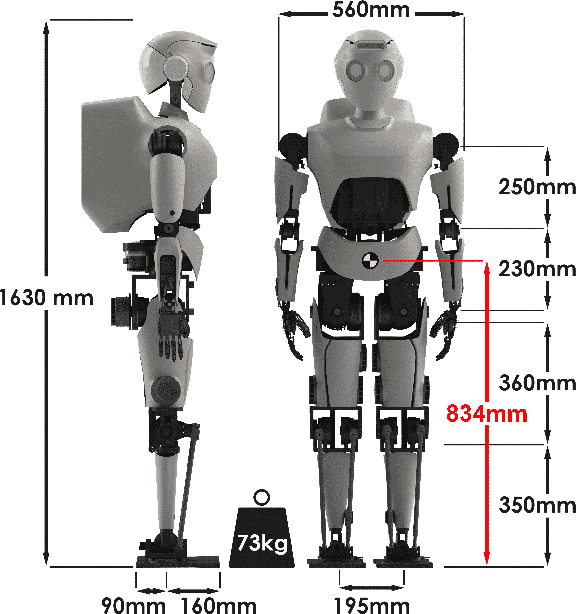
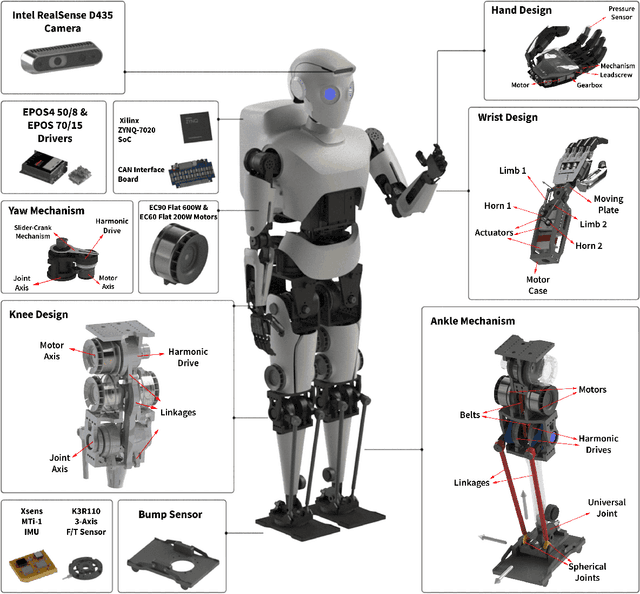
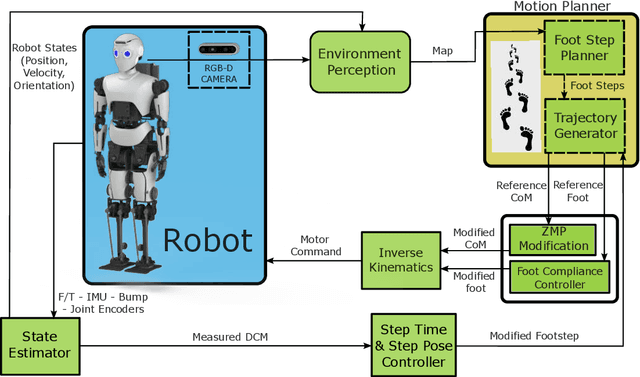
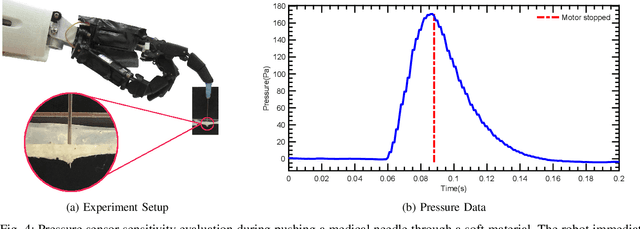
This paper presents Surena-V, a humanoid robot designed to enhance human-robot collaboration capabilities. The robot features a range of sensors, including barometric tactile sensors in its hands, to facilitate precise environmental interaction. This is demonstrated through an experiment showcasing the robot's ability to control a medical needle's movement through soft material. Surena-V's operational framework emphasizes stability and collaboration, employing various optimization-based control strategies such as Zero Moment Point (ZMP) modification through upper body movement and stepping. Notably, the robot's interaction with the environment is improved by detecting and interpreting external forces at their point of effect, allowing for more agile responses compared to methods that control overall balance based on external forces. The efficacy of this architecture is substantiated through an experiment illustrating the robot's collaboration with a human in moving a bar. This work contributes to the field of humanoid robotics by presenting a comprehensive system design and control architecture focused on human-robot collaboration and environmental adaptability.
SURENA IV: Towards A Cost-effective Full-size Humanoid Robot for Real-world Scenarios
Aug 30, 2021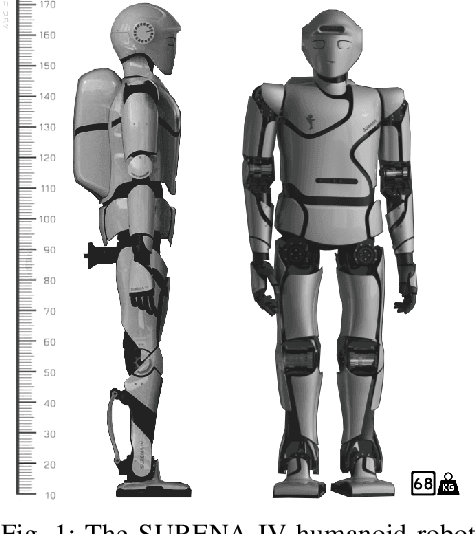
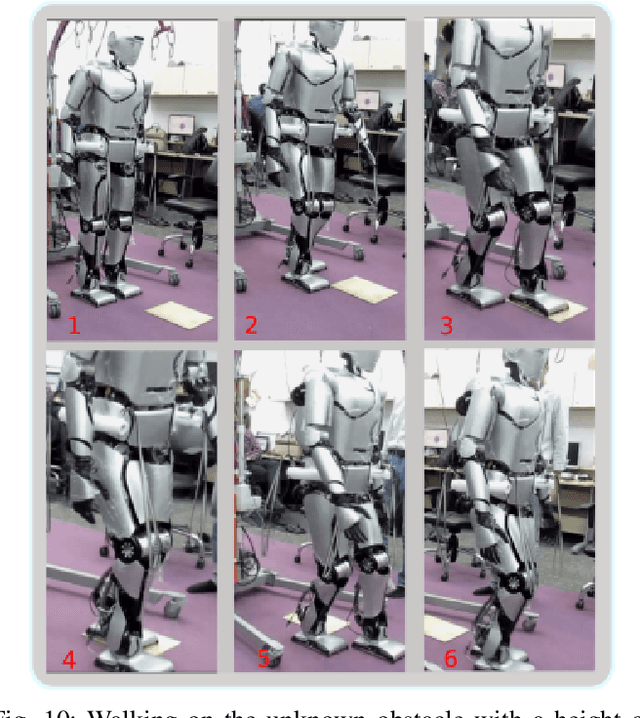

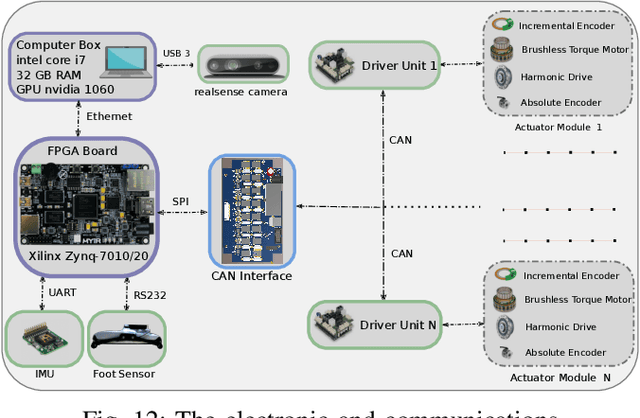
This paper describes the hardware, software framework, and experimental testing of SURENA IV humanoid robotics platform. SURENA IV has 43 degrees of freedom (DoFs), including seven DoFs for each arm, six DoFs for each hand, and six DoFs for each leg, with a height of 170 cm and a mass of 68 kg and morphological and mass properties similar to an average adult human. SURENA IV aims to realize a cost-effective and anthropomorphic humanoid robot for real-world scenarios. In this way, we demonstrate a locomotion framework based on a novel and inexpensive predictive foot sensor that enables walking with 7cm foot position error because of accumulative error of links and connections' deflection(that has been manufactured by the tools which are available in the Universities). Thanks to this sensor, the robot can walk on unknown obstacles without any force feedback, by online adaptation of foot height and orientation. Moreover, the arm and hand of the robot have been designed to grasp the objects with different stiffness and geometries that enable the robot to do drilling, visual servoing of a moving object, and writing his name on the white-board.