 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurena-V: A Humanoid Robot for Human-Robot Collaboration with Optimization-based Control Architecture
Jan 28, 2025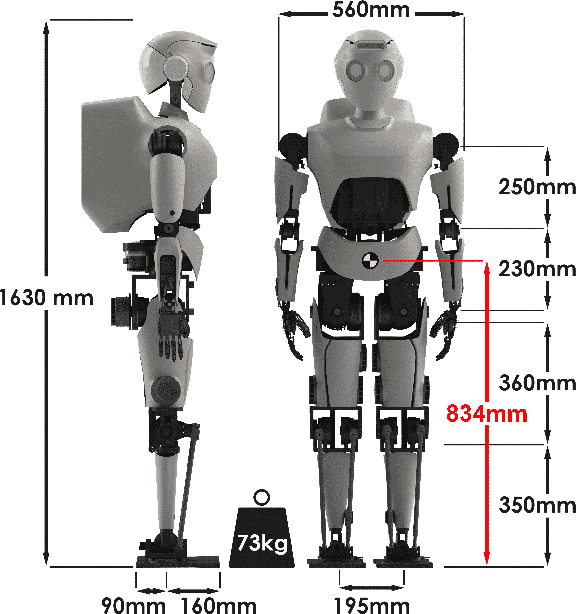
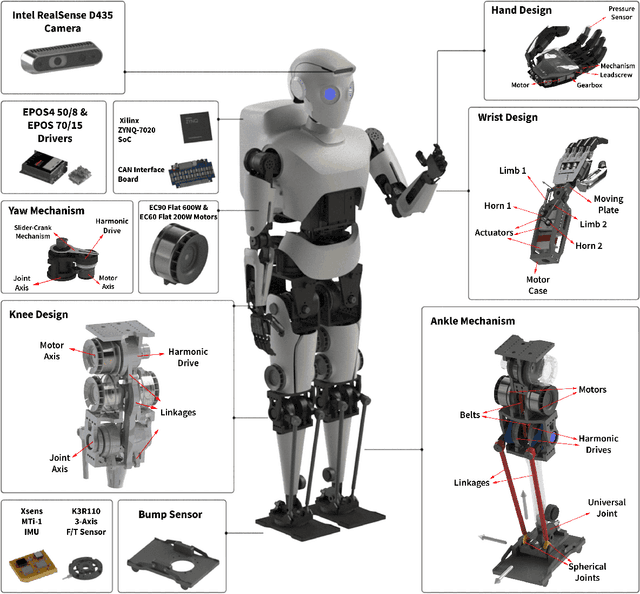
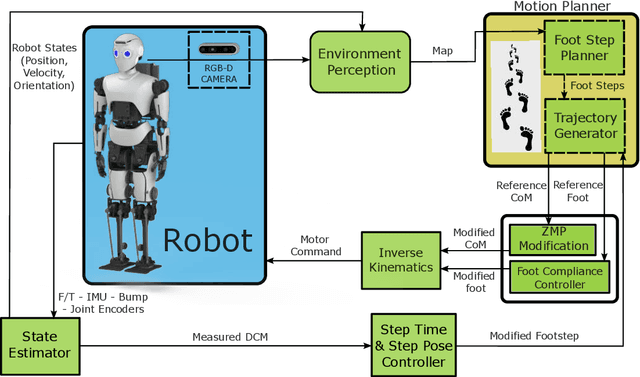
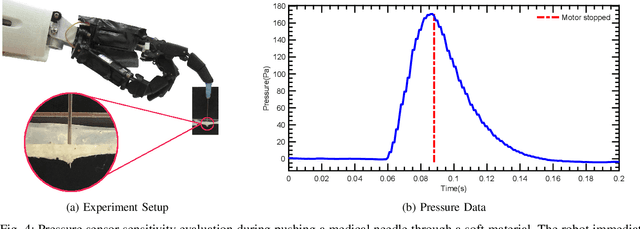
This paper presents Surena-V, a humanoid robot designed to enhance human-robot collaboration capabilities. The robot features a range of sensors, including barometric tactile sensors in its hands, to facilitate precise environmental interaction. This is demonstrated through an experiment showcasing the robot's ability to control a medical needle's movement through soft material. Surena-V's operational framework emphasizes stability and collaboration, employing various optimization-based control strategies such as Zero Moment Point (ZMP) modification through upper body movement and stepping. Notably, the robot's interaction with the environment is improved by detecting and interpreting external forces at their point of effect, allowing for more agile responses compared to methods that control overall balance based on external forces. The efficacy of this architecture is substantiated through an experiment illustrating the robot's collaboration with a human in moving a bar. This work contributes to the field of humanoid robotics by presenting a comprehensive system design and control architecture focused on human-robot collaboration and environmental adaptability.
Comparative Evaluation of RGB-D SLAM Methods for Humanoid Robot Localization and Mapping
Jan 05, 2024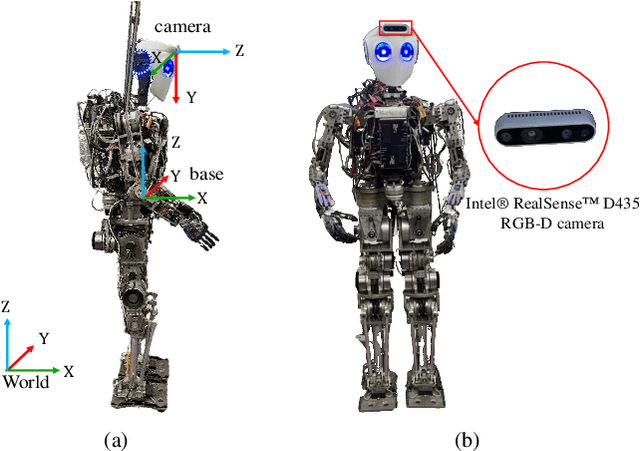
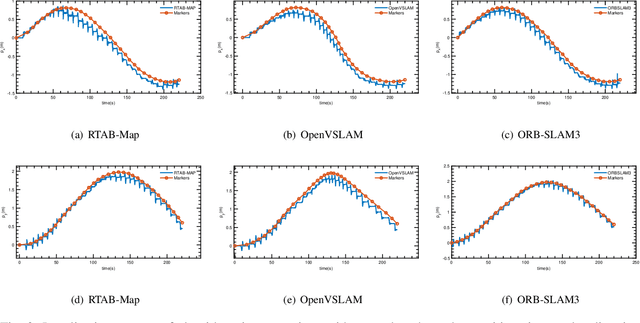
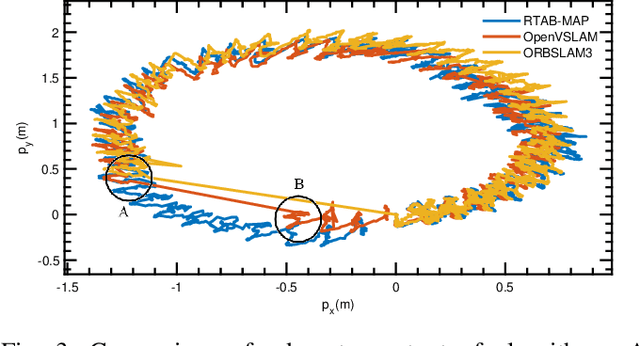
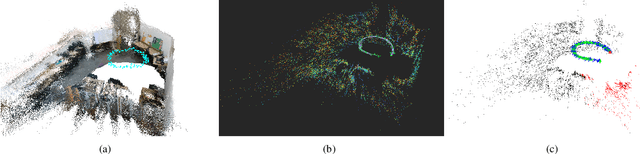
In this paper, we conducted a comparative evaluation of three RGB-D SLAM (Simultaneous Localization and Mapping) algorithms: RTAB-Map, ORB-SLAM3, and OpenVSLAM for SURENA-V humanoid robot localization and mapping. Our test involves the robot to follow a full circular pattern, with an Intel RealSense D435 RGB-D camera installed on its head. In assessing localization accuracy, ORB-SLAM3 outperformed the others with an ATE of 0.1073, followed by RTAB-Map at 0.1641 and OpenVSLAM at 0.1847. However, it should be noted that both ORB-SLAM3 and OpenVSLAM faced challenges in maintaining accurate odometry when the robot encountered a wall with limited feature points. Nevertheless, OpenVSLAM demonstrated the ability to detect loop closures and successfully relocalize itself within the map when the robot approached its initial location. The investigation also extended to mapping capabilities, where RTAB-Map excelled by offering diverse mapping outputs, including dense, OctoMap, and occupancy grid maps. In contrast, both ORB-SLAM3 and OpenVSLAM provided only sparse maps.