 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurena-V: A Humanoid Robot for Human-Robot Collaboration with Optimization-based Control Architecture
Jan 28, 2025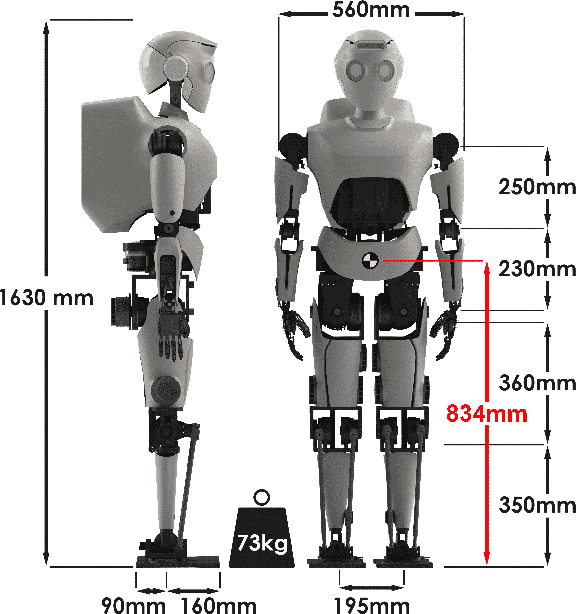
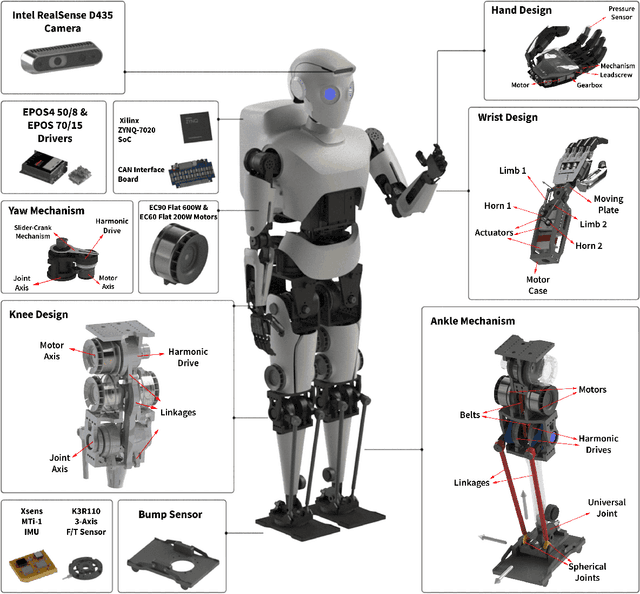
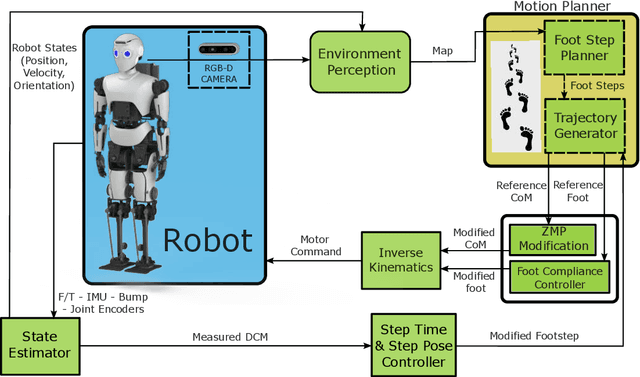
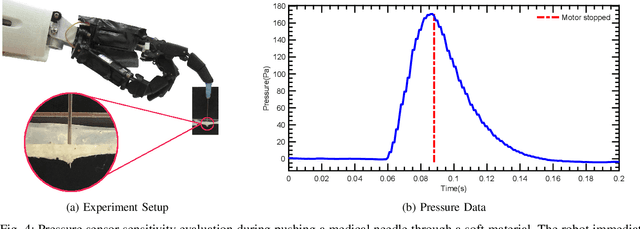
This paper presents Surena-V, a humanoid robot designed to enhance human-robot collaboration capabilities. The robot features a range of sensors, including barometric tactile sensors in its hands, to facilitate precise environmental interaction. This is demonstrated through an experiment showcasing the robot's ability to control a medical needle's movement through soft material. Surena-V's operational framework emphasizes stability and collaboration, employing various optimization-based control strategies such as Zero Moment Point (ZMP) modification through upper body movement and stepping. Notably, the robot's interaction with the environment is improved by detecting and interpreting external forces at their point of effect, allowing for more agile responses compared to methods that control overall balance based on external forces. The efficacy of this architecture is substantiated through an experiment illustrating the robot's collaboration with a human in moving a bar. This work contributes to the field of humanoid robotics by presenting a comprehensive system design and control architecture focused on human-robot collaboration and environmental adaptability.
Kinematic Base State Estimation for Humanoid using Invariant Extended Kalman Filter
Jan 05, 2024This paper presents the design and implementation of a Right Invariant Extended Kalman Filter (RIEKF) for estimating the states of the kinematic base of the Surena V humanoid robot. The state representation of the robot is defined on the Lie group $SE_4(3)$, encompassing the position, velocity, and orientation of the base, as well as the position of the left and right feet. In addition, we incorporated IMU biases as concatenated states within the filter. The prediction step of the RIEKF utilizes IMU equations, while the update step incorporates forward kinematics. To evaluate the performance of the RIEKF, we conducted experiments using the Choreonoid dynamic simulation framework and compared it against a Quaternion-based Extended Kalman Filter (QEKF). The results of the analysis demonstrate that the RIEKF exhibits reduced drift in localization and achieves estimation convergence in a shorter time compared to the QEKF. These findings highlight the effectiveness of the proposed RIEKF for accurate state estimation of the kinematic base in humanoid robotics.
Comparative Evaluation of RGB-D SLAM Methods for Humanoid Robot Localization and Mapping
Jan 05, 2024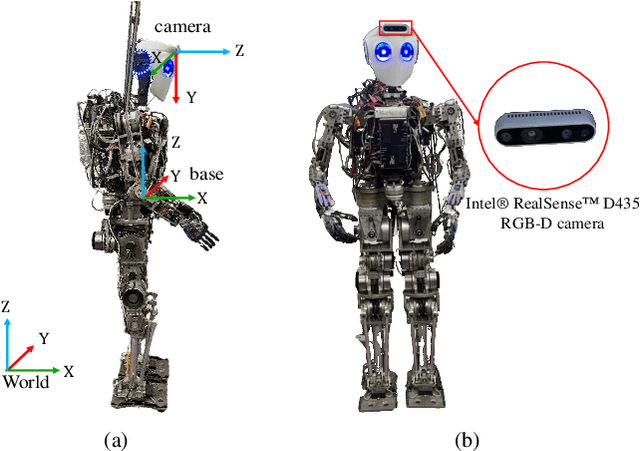
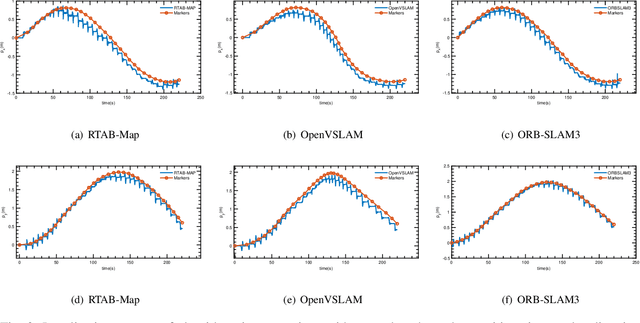
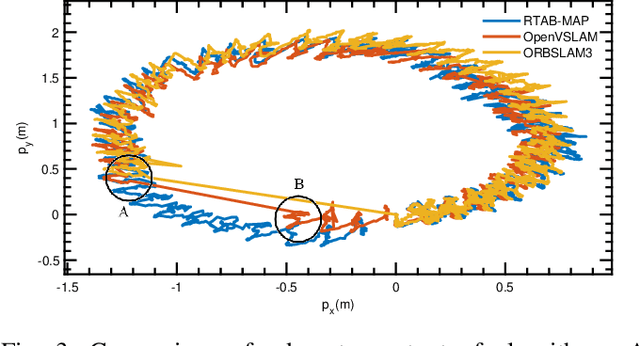
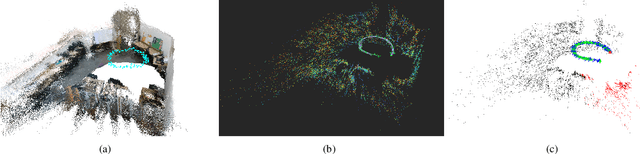
In this paper, we conducted a comparative evaluation of three RGB-D SLAM (Simultaneous Localization and Mapping) algorithms: RTAB-Map, ORB-SLAM3, and OpenVSLAM for SURENA-V humanoid robot localization and mapping. Our test involves the robot to follow a full circular pattern, with an Intel RealSense D435 RGB-D camera installed on its head. In assessing localization accuracy, ORB-SLAM3 outperformed the others with an ATE of 0.1073, followed by RTAB-Map at 0.1641 and OpenVSLAM at 0.1847. However, it should be noted that both ORB-SLAM3 and OpenVSLAM faced challenges in maintaining accurate odometry when the robot encountered a wall with limited feature points. Nevertheless, OpenVSLAM demonstrated the ability to detect loop closures and successfully relocalize itself within the map when the robot approached its initial location. The investigation also extended to mapping capabilities, where RTAB-Map excelled by offering diverse mapping outputs, including dense, OctoMap, and occupancy grid maps. In contrast, both ORB-SLAM3 and OpenVSLAM provided only sparse maps.
Estimation and Early Prediction of Grip Force Based on sEMG Signals and Deep Recurrent Neural Networks
Feb 19, 2023Hands are used for communicating with the surrounding environment and have a complex structure that enables them to perform various tasks with their multiple degrees of freedom. Hand amputation can prevent a person from performing their daily activities. In that event, finding a suitable, fast, and reliable alternative for the missing limb can affect the lives of people who suffer from such conditions. As the most important use of the hands is to grasp objects, the purpose of this study is to accurately predict gripping force from surface electromyography (sEMG) signals during a pinch-type grip. In that regard, gripping force and sEMG signals are derived from 10 healthy subjects. Results show that for this task, recurrent networks outperform nonrecurrent ones, such as a fully connected multilayer perceptron (MLP) network. Gated recurrent unit (GRU) and long short-term memory (LSTM) networks can predict the gripping force with R-squared values of 0.994 and 0.992, respectively, and a prediction rate of over 1300 predictions per second. The predominant advantage of using such frameworks is that the gripping force can be predicted straight from preprocessed sEMG signals without any form of feature extraction, not to mention the ability to predict future force values using larger prediction horizons adequately. The methods presented in this study can be used in the myoelectric control of prosthetic hands or robotic grippers.
Online Bipedal Locomotion Adaptation for Stepping on Obstacles Using a Novel Foot Sensor
Dec 27, 2022



In this paper, we present a novel control architecture for the online adaptation of bipedal locomotion on inclined obstacles. In particular, we introduce a novel, cost-effective, and versatile foot sensor to detect the proximity of the robot's feet to the ground (bump sensor). By employing this sensor, feedback controllers are implemented to reduce the impact forces during the transition of the swing to stance phase or steeping on inclined unseen obstacles. Compared to conventional sensors based on contact reaction force, this sensor detects the distance to the ground or obstacles before the foot touches the obstacle and therefore provides predictive information to anticipate the obstacles. The controller of the proposed bump sensor interacts with another admittance controller to adjust leg length. The walking experiments show successful locomotion on the unseen inclined obstacle without reducing the locomotion speed with a slope angle of 12. Foot position error causes a hard impact with the ground as a consequence of accumulative error caused by links and connections' deflection (which is manufactured by university tools). The proposed framework drastically reduces the feet' impact with the ground.
Bipedal Locomotion Optimization by Exploitation of the Full Dynamics in DCM Trajectory Planning
Jul 30, 2022
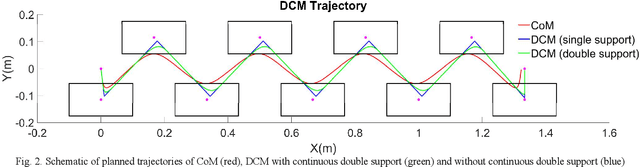
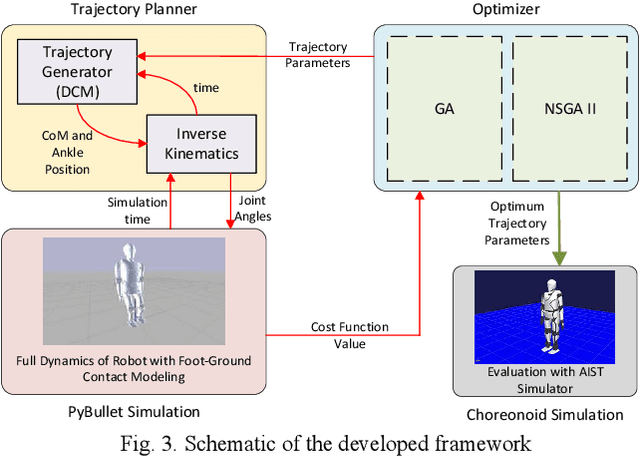
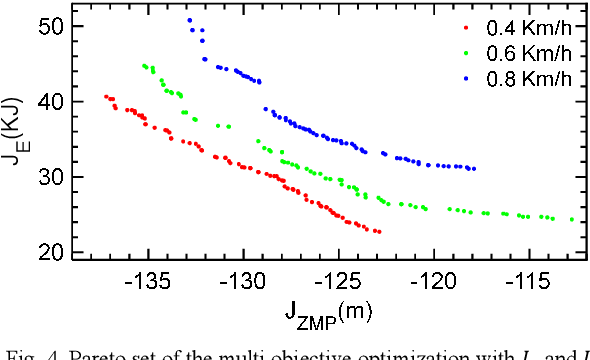
Walking motion planning based on Divergent Component of Motion (DCM) and Linear Inverted Pendulum Model (LIPM) is one of the alternatives that could be implemented to generate online humanoid robot gait trajectories. This algorithm requires different parameters to be adjusted. Herein, we developed a framework to attain optimal parameters to achieve a stable and energy-efficient trajectory for real robot's gait. To find the optimal trajectory, four cost functions representing energy consumption, the sum of joints velocity and applied torque at each lower limb joint of the robot, and a cost function based on the Zero Moment Point (ZMP) stability criterion were considered. Genetic algorithm was employed in the framework to optimize each of these cost functions. Although the trajectory planning was done with the help of the simplified model, the values of each cost function were obtained by considering the full dynamics model and foot-ground contact model in Bullet physics engine simulator. The results of this optimization yield that walking with the most stability and walking in the most efficient way are in contrast with each other. Therefore, in another attempt, multi-objective optimization for ZMP and energy cost functions at three different speeds was performed. Finally, we compared the designed trajectory, which was generated using optimal parameters, with the simulation results in Choreonoid simulator.