 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative AI for Autonomous Driving: Frontiers and Opportunities
May 13, 2025Generative Artificial Intelligence (GenAI) constitutes a transformative technological wave that reconfigures industries through its unparalleled capabilities for content creation, reasoning, planning, and multimodal understanding. This revolutionary force offers the most promising path yet toward solving one of engineering's grandest challenges: achieving reliable, fully autonomous driving, particularly the pursuit of Level 5 autonomy. This survey delivers a comprehensive and critical synthesis of the emerging role of GenAI across the autonomous driving stack. We begin by distilling the principles and trade-offs of modern generative modeling, encompassing VAEs, GANs, Diffusion Models, and Large Language Models (LLMs). We then map their frontier applications in image, LiDAR, trajectory, occupancy, video generation as well as LLM-guided reasoning and decision making. We categorize practical applications, such as synthetic data workflows, end-to-end driving strategies, high-fidelity digital twin systems, smart transportation networks, and cross-domain transfer to embodied AI. We identify key obstacles and possibilities such as comprehensive generalization across rare cases, evaluation and safety checks, budget-limited implementation, regulatory compliance, ethical concerns, and environmental effects, while proposing research plans across theoretical assurances, trust metrics, transport integration, and socio-technical influence. By unifying these threads, the survey provides a forward-looking reference for researchers, engineers, and policymakers navigating the convergence of generative AI and advanced autonomous mobility. An actively maintained repository of cited works is available at https://github.com/taco-group/GenAI4AD.
Temporal Binding Foundation Model for Material Property Recognition via Tactile Sequence Perception
Jan 24, 2025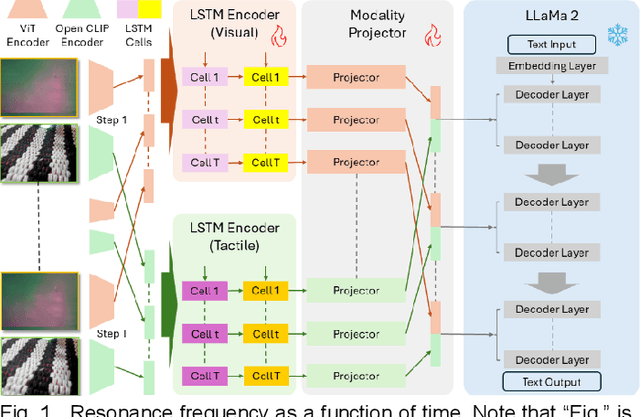

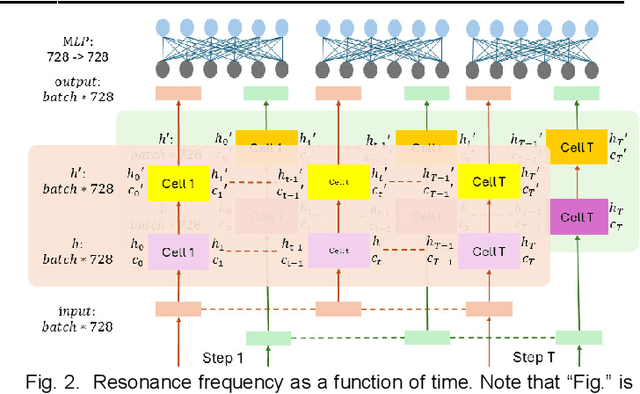
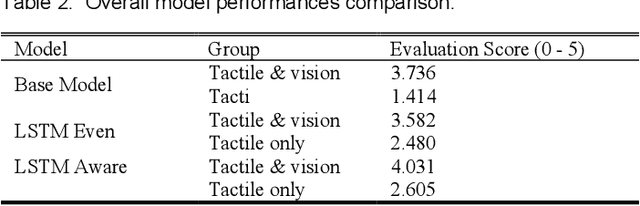
Robots engaged in complex manipulation tasks require robust material property recognition to ensure adaptability and precision. Traditionally, visual data has been the primary source for object perception; however, it often proves insufficient in scenarios where visibility is obstructed or detailed observation is needed. This gap highlights the necessity of tactile sensing as a complementary or primary input for material recognition. Tactile data becomes particularly essential in contact-rich, small-scale manipulations where subtle deformations and surface interactions cannot be accurately captured by vision alone. This letter presents a novel approach leveraging a temporal binding foundation model for tactile sequence understanding to enhance material property recognition. By processing tactile sensor data with a temporal focus, the proposed system captures the sequential nature of tactile interactions, similar to human fingertip perception. Additionally, this letter demonstrates that, through tailored and specific design, the foundation model can more effectively capture temporal information embedded in tactile sequences, advancing material property understanding. Experimental results validate the model's capability to capture these temporal patterns, confirming its utility for material property recognition in visually restricted scenarios. This work underscores the necessity of embedding advanced tactile data processing frameworks within robotic systems to achieve truly embodied and responsive manipulation capabilities.
Force-Based Robotic Imitation Learning: A Two-Phase Approach for Construction Assembly Tasks
Jan 24, 2025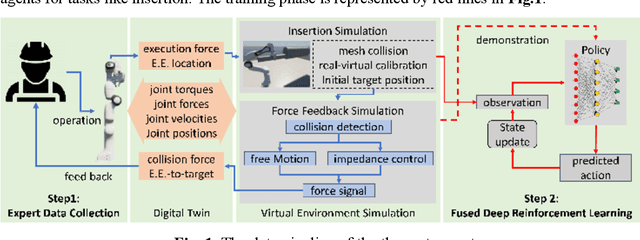
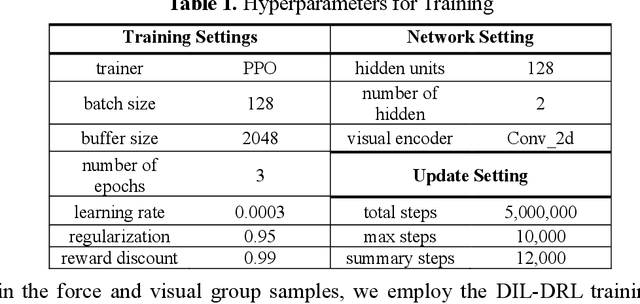
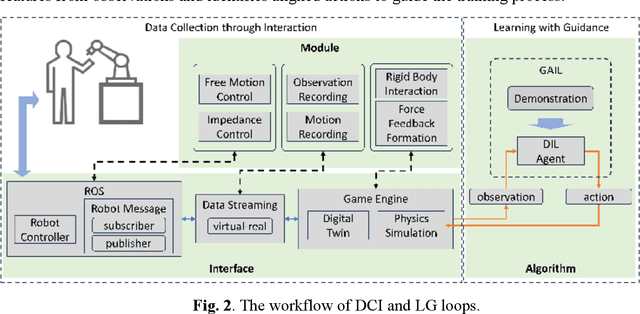
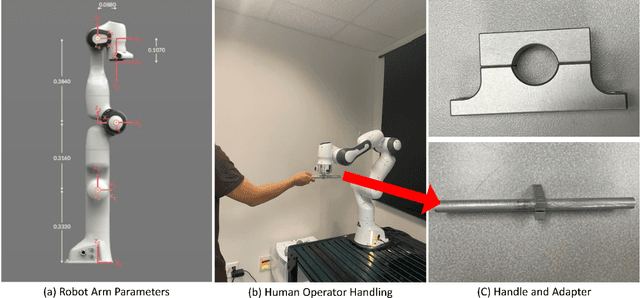
The drive for efficiency and safety in construction has boosted the role of robotics and automation. However, complex tasks like welding and pipe insertion pose challenges due to their need for precise adaptive force control, which complicates robotic training. This paper proposes a two-phase system to improve robot learning, integrating human-derived force feedback. The first phase captures real-time data from operators using a robot arm linked with a virtual simulator via ROS-Sharp. In the second phase, this feedback is converted into robotic motion instructions, using a generative approach to incorporate force feedback into the learning process. This method's effectiveness is demonstrated through improved task completion times and success rates. The framework simulates realistic force-based interactions, enhancing the training data's quality for precise robotic manipulation in construction tasks.
Improved Trust in Human-Robot Collaboration with ChatGPT
Apr 25, 2023



Human robot collaboration is becoming increasingly important as robots become more involved in various aspects of human life in the era of Artificial Intelligence. However, the issue of human operators trust in robots remains a significant concern, primarily due to the lack of adequate semantic understanding and communication between humans and robots. The emergence of Large Language Models (LLMs), such as ChatGPT, provides an opportunity to develop an interactive, communicative, and robust human-robot collaboration approach. This paper explores the impact of ChatGPT on trust in a human-robot collaboration assembly task. This study designs a robot control system called RoboGPT using ChatGPT to control a 7-degree-of-freedom robot arm to help human operators fetch, and place tools, while human operators can communicate with and control the robot arm using natural language. A human-subject experiment showed that incorporating ChatGPT in robots significantly increased trust in human-robot collaboration, which can be attributed to the robot's ability to communicate more effectively with humans. Furthermore, ChatGPT ability to understand the nuances of human language and respond appropriately helps to build a more natural and intuitive human-robot interaction. The findings of this study have significant implications for the development of human-robot collaboration systems.
Robot-Enabled Construction Assembly with Automated Sequence Planning based on ChatGPT: RoboGPT
Apr 21, 2023Robot-based assembly in construction has emerged as a promising solution to address numerous challenges such as increasing costs, labor shortages, and the demand for safe and efficient construction processes. One of the main obstacles in realizing the full potential of these robotic systems is the need for effective and efficient sequence planning for construction tasks. Current approaches, including mathematical and heuristic techniques or machine learning methods, face limitations in their adaptability and scalability to dynamic construction environments. To expand the ability of the current robot system in sequential understanding, this paper introduces RoboGPT, a novel system that leverages the advanced reasoning capabilities of ChatGPT, a large language model, for automated sequence planning in robot-based assembly applied to construction tasks. The proposed system adapts ChatGPT for construction sequence planning and demonstrate its feasibility and effectiveness through experimental evaluation including Two case studies and 80 trials about real construction tasks. The results show that RoboGPT-driven robots can handle complex construction operations and adapt to changes on the fly. This paper contributes to the ongoing efforts to enhance the capabilities and performance of robot-based assembly systems in the construction industry, and it paves the way for further integration of large language model technologies in the field of construction robotics.