 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNVRadarNet: Real-Time Radar Obstacle and Free Space Detection for Autonomous Driving
Sep 29, 2022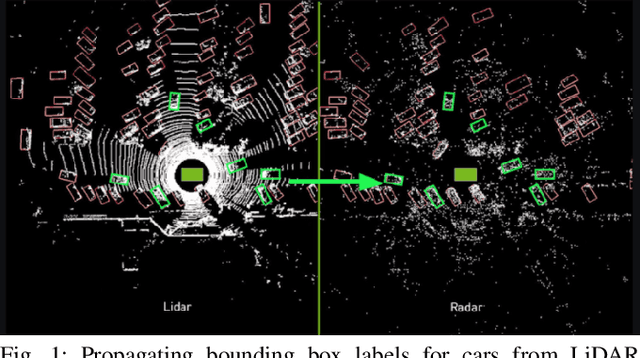
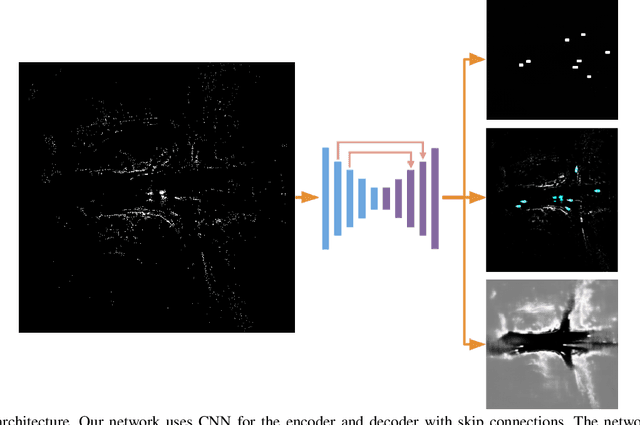
Detecting obstacles is crucial for safe and efficient autonomous driving. To this end, we present NVRadarNet, a deep neural network (DNN) that detects dynamic obstacles and drivable free space using automotive RADAR sensors. The network utilizes temporally accumulated data from multiple RADAR sensors to detect dynamic obstacles and compute their orientation in a top-down bird's-eye view (BEV). The network also regresses drivable free space to detect unclassified obstacles. Our DNN is the first of its kind to utilize sparse RADAR signals in order to perform obstacle and free space detection in real time from RADAR data only. The network has been successfully used for perception on our autonomous vehicles in real self-driving scenarios. The network runs faster than real time on an embedded GPU and shows good generalization across geographic regions.
End-to-End Lane Marker Detection via Row-wise Classification
May 06, 2020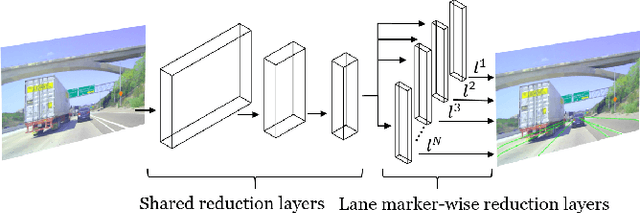
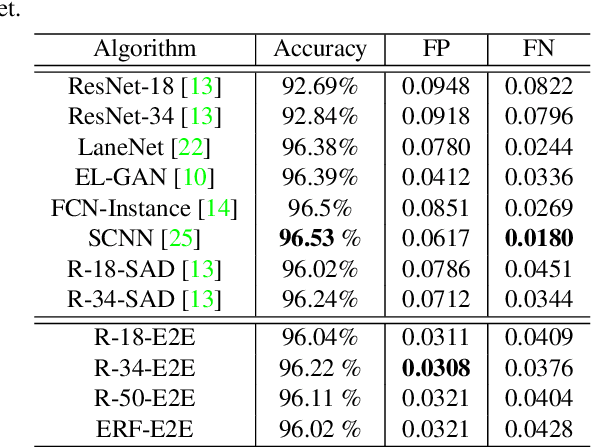
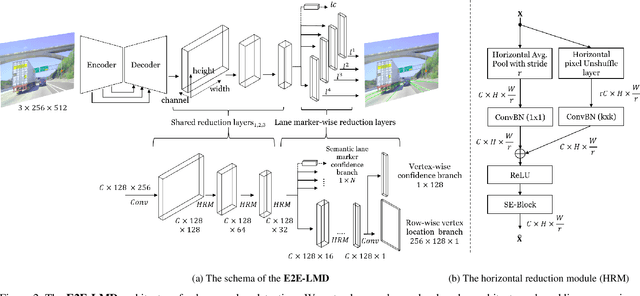
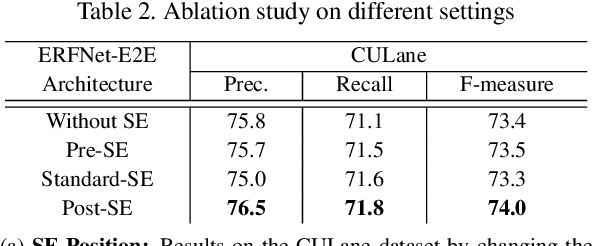
In autonomous driving, detecting reliable and accurate lane marker positions is a crucial yet challenging task. The conventional approaches for the lane marker detection problem perform a pixel-level dense prediction task followed by sophisticated post-processing that is inevitable since lane markers are typically represented by a collection of line segments without thickness. In this paper, we propose a method performing direct lane marker vertex prediction in an end-to-end manner, i.e., without any post-processing step that is required in the pixel-level dense prediction task. Specifically, we translate the lane marker detection problem into a row-wise classification task, which takes advantage of the innate shape of lane markers but, surprisingly, has not been explored well. In order to compactly extract sufficient information about lane markers which spread from the left to the right in an image, we devise a novel layer, which is utilized to successively compress horizontal components so enables an end-to-end lane marker detection system where the final lane marker positions are simply obtained via argmax operations in testing time. Experimental results demonstrate the effectiveness of the proposed method, which is on par or outperforms the state-of-the-art methods on two popular lane marker detection benchmarks, i.e., TuSimple and CULane.