 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePost-Training and Test-Time Scaling of Generative Agent Behavior Models for Interactive Autonomous Driving
Dec 15, 2025Learning interactive motion behaviors among multiple agents is a core challenge in autonomous driving. While imitation learning models generate realistic trajectories, they often inherit biases from datasets dominated by safe demonstrations, limiting robustness in safety-critical cases. Moreover, most studies rely on open-loop evaluation, overlooking compounding errors in closed-loop execution. We address these limitations with two complementary strategies. First, we propose Group Relative Behavior Optimization (GRBO), a reinforcement learning post-training method that fine-tunes pretrained behavior models via group relative advantage maximization with human regularization. Using only 10% of the training dataset, GRBO improves safety performance by over 40% while preserving behavioral realism. Second, we introduce Warm-K, a warm-started Top-K sampling strategy that balances consistency and diversity in motion selection. Our Warm-K method-based test-time scaling enhances behavioral consistency and reactivity at test time without retraining, mitigating covariate shift and reducing performance discrepancies. Demo videos are available in the supplementary material.
1-Point RANSAC-Based Method for Ground Object Pose Estimation
Aug 09, 2020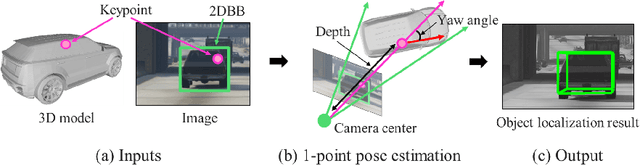
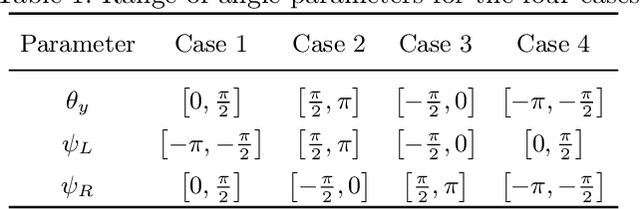
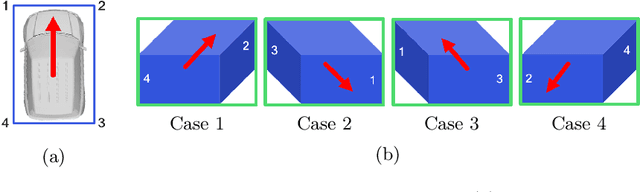
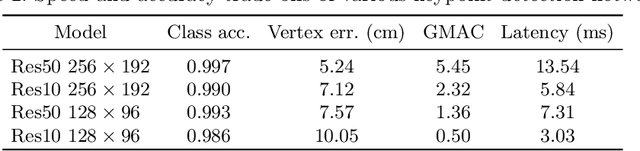
Solving Perspective-n-Point (PnP) problems is a traditional way of estimating object poses. Given outlier-contaminated data, a pose of an object is calculated with PnP algorithms of n = {3, 4} in the RANSAC-based scheme. However, the computational complexity considerably increases along with n and the high complexity imposes a severe strain on devices which should estimate multiple object poses in real time. In this paper, we propose an efficient method based on 1-point RANSAC for estimating a pose of an object on the ground. In the proposed method, a pose is calculated with 1-DoF parameterization by using a ground object assumption and a 2D object bounding box as an additional observation, thereby achieving the fastest performance among the RANSAC-based methods. In addition, since the method suffers from the errors of the additional information, we propose a hierarchical robust estimation method for polishing a rough pose estimate and discovering more inliers in a coarse-to-fine manner. The experiments in synthetic and real-world datasets demonstrate the superiority of the proposed method.
End-to-End Lane Marker Detection via Row-wise Classification
May 06, 2020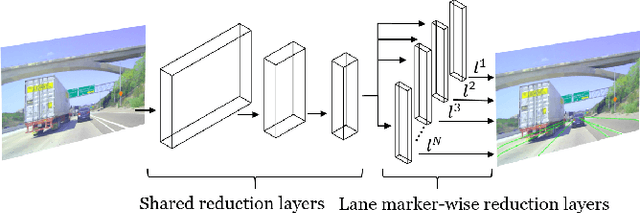
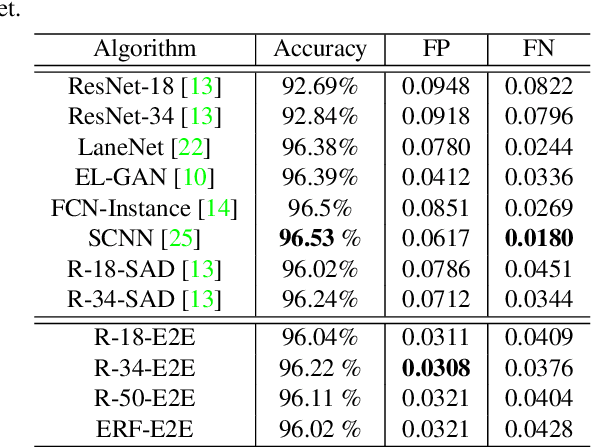
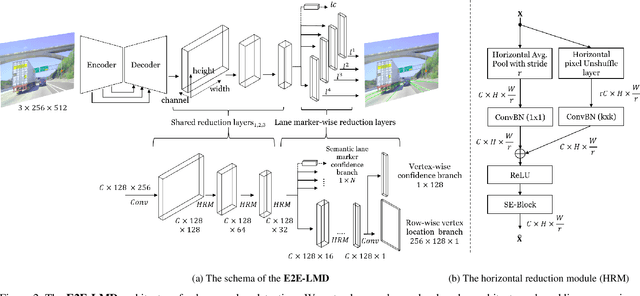
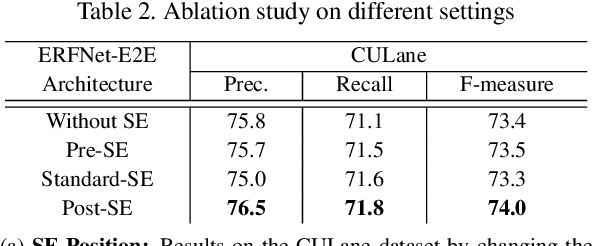
In autonomous driving, detecting reliable and accurate lane marker positions is a crucial yet challenging task. The conventional approaches for the lane marker detection problem perform a pixel-level dense prediction task followed by sophisticated post-processing that is inevitable since lane markers are typically represented by a collection of line segments without thickness. In this paper, we propose a method performing direct lane marker vertex prediction in an end-to-end manner, i.e., without any post-processing step that is required in the pixel-level dense prediction task. Specifically, we translate the lane marker detection problem into a row-wise classification task, which takes advantage of the innate shape of lane markers but, surprisingly, has not been explored well. In order to compactly extract sufficient information about lane markers which spread from the left to the right in an image, we devise a novel layer, which is utilized to successively compress horizontal components so enables an end-to-end lane marker detection system where the final lane marker positions are simply obtained via argmax operations in testing time. Experimental results demonstrate the effectiveness of the proposed method, which is on par or outperforms the state-of-the-art methods on two popular lane marker detection benchmarks, i.e., TuSimple and CULane.