 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge1-Point RANSAC-Based Method for Ground Object Pose Estimation
Paper and Code
Aug 09, 2020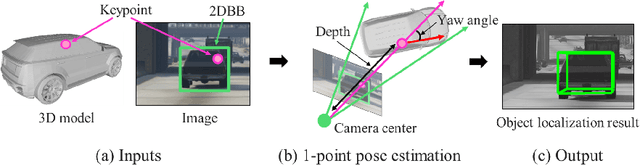
Solving Perspective-n-Point (PnP) problems is a traditional way of estimating object poses. Given outlier-contaminated data, a pose of an object is calculated with PnP algorithms of n = {3, 4} in the RANSAC-based scheme. However, the computational complexity considerably increases along with n and the high complexity imposes a severe strain on devices which should estimate multiple object poses in real time. In this paper, we propose an efficient method based on 1-point RANSAC for estimating a pose of an object on the ground. In the proposed method, a pose is calculated with 1-DoF parameterization by using a ground object assumption and a 2D object bounding box as an additional observation, thereby achieving the fastest performance among the RANSAC-based methods. In addition, since the method suffers from the errors of the additional information, we propose a hierarchical robust estimation method for polishing a rough pose estimate and discovering more inliers in a coarse-to-fine manner. The experiments in synthetic and real-world datasets demonstrate the superiority of the proposed method.