 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021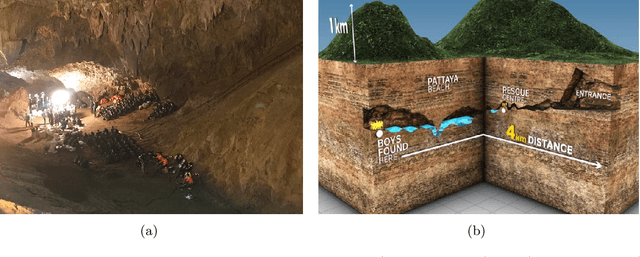
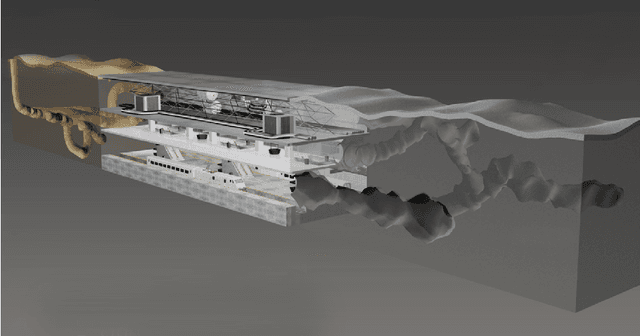
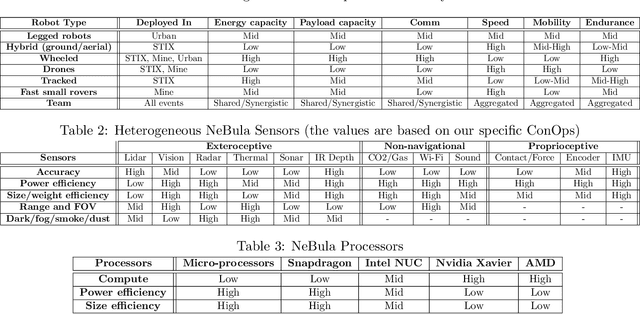
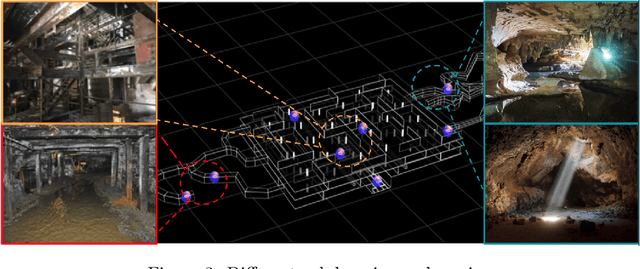
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
Robust Collision-free Lightweight Aerial Autonomy for Unknown Area Exploration
Mar 16, 2021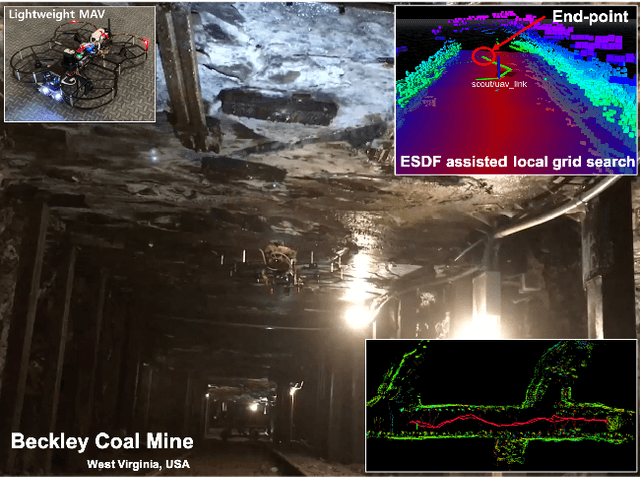
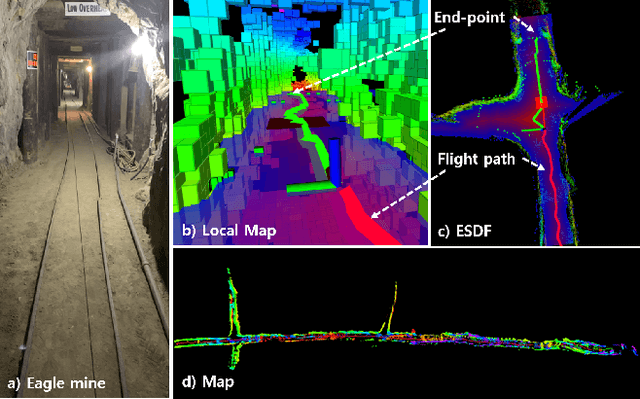
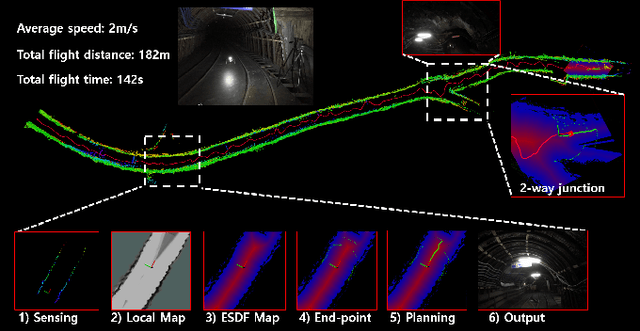
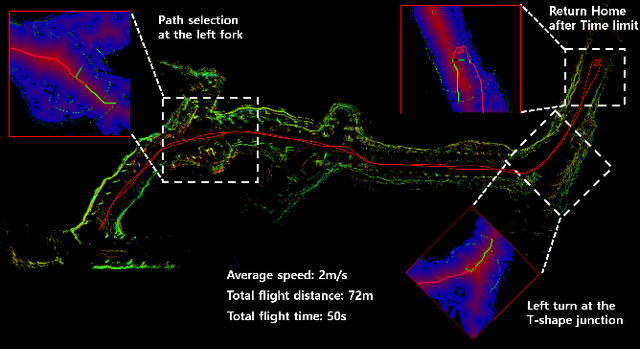
Collision-free path planning is an essential requirement for autonomous exploration in unknown environments, especially when operating in confined spaces or near obstacles. This study presents an autonomous exploration technique using a small drone. A local end-point selection method is designed using LiDAR range measurement and then generates the path from the current position to the selected end-point. The generated path shows the consistent collision-free path in real-time by adopting the Euclidean signed distance field-based grid-search method. The simulation results consistently showed the safety, and reliability of the proposed path-planning method. Real-world experiments are conducted in three different mines, demonstrating successful autonomous exploration flight in environments with various structural conditions. The results showed the high capability of the proposed flight autonomy framework for lightweight aerial-robot systems. Besides, our drone performs an autonomous mission during our entry at the Tunnel Circuit competition (Phase 1) of the DARPA Subterranean Challenge.