 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
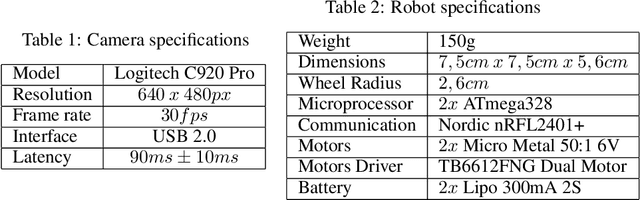
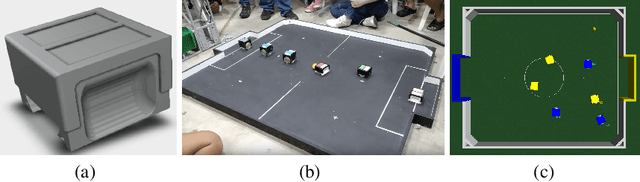
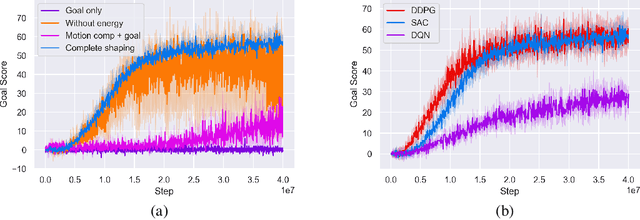
Add to EdgePlanning the path with Reinforcement Learning: Optimal Robot Motion Planning in RoboCup Small Size League Environments
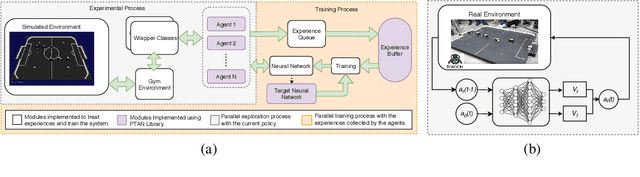
Apr 23, 2024This work investigates the potential of Reinforcement Learning (RL) to tackle robot motion planning challenges in the dynamic RoboCup Small Size League (SSL). Using a heuristic control approach, we evaluate RL's effectiveness in obstacle-free and single-obstacle path-planning environments. Ablation studies reveal significant performance improvements. Our method achieved a 60% time gain in obstacle-free environments compared to baseline algorithms. Additionally, our findings demonstrated dynamic obstacle avoidance capabilities, adeptly navigating around moving blocks. These findings highlight the potential of RL to enhance robot motion planning in the challenging and unpredictable SSL environment.
Topological Semantic Mapping by Consolidation of Deep Visual Features
Jun 24, 2021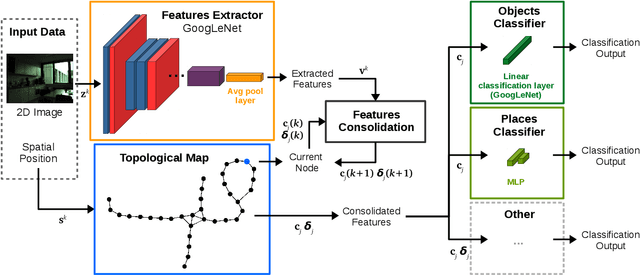
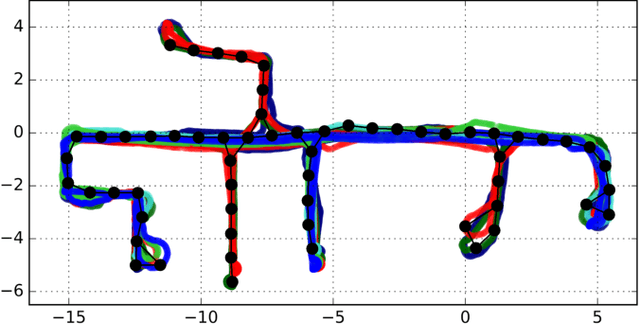
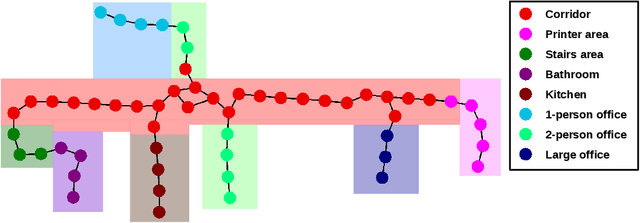
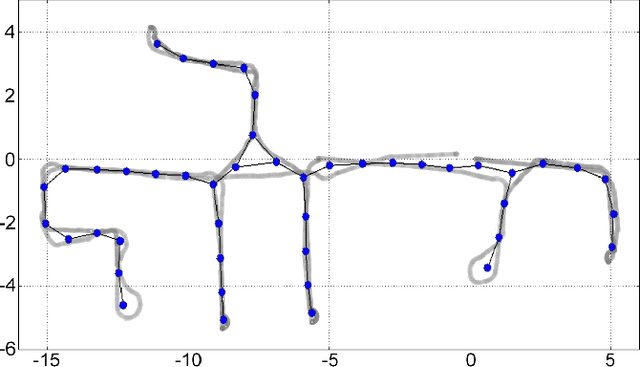
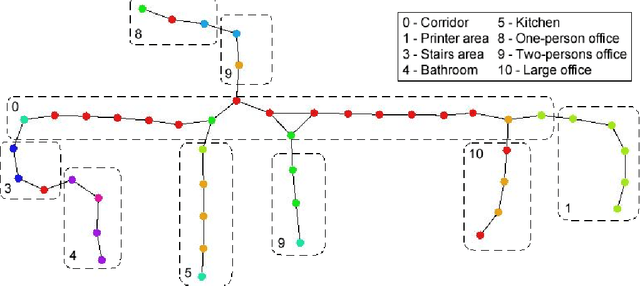
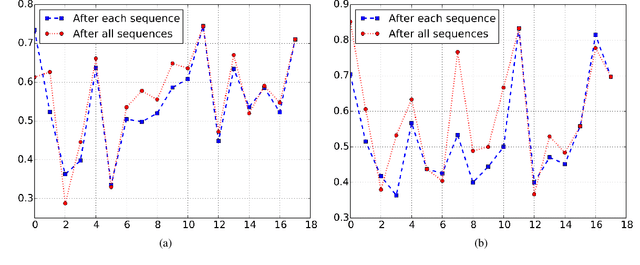
Many works in the recent literature introduce semantic mapping methods that use CNNs (Convolutional Neural Networks) to recognize semantic properties in images. The types of properties (eg.: room size, place category, and objects) and their classes (eg.: kitchen and bathroom, for place category) are usually predefined and restricted to a specific task. Thus, all the visual data acquired and processed during the construction of the maps are lost and only the recognized semantic properties remain on the maps. In contrast, this work introduces a topological semantic mapping method that uses deep visual features extracted by a CNN, the GoogLeNet, from 2D images captured in multiple views of the environment as the robot operates, to create consolidated representations of visual features acquired in the regions covered by each topological node. These consolidated representations allow flexible recognition of semantic properties of the regions and use in a range of visual tasks. The experiments, performed using a real-world indoor dataset, showed that the method is able to consolidate the visual features of regions and use them to recognize objects and place categories as semantic properties, and to indicate the topological location of images, with very promising results. The objects are classified using the classification layer of GoogLeNet, without retraining, and the place categories are recognized using a shallow Multilayer Perceptron.
rSoccer: A Framework for Studying Reinforcement Learning in Small and Very Small Size Robot Soccer
Jun 15, 2021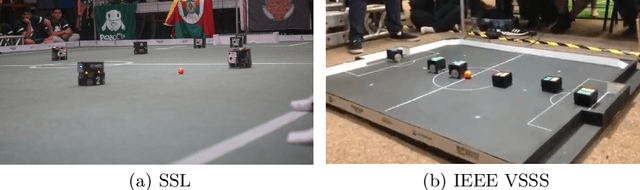

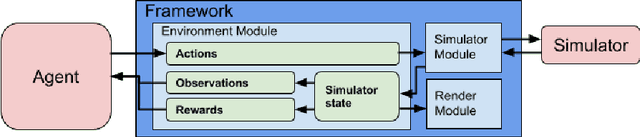
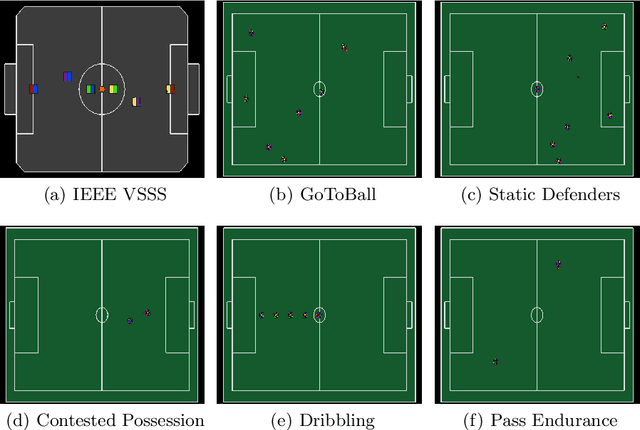
Reinforcement learning is an active research area with a vast number of applications in robotics, and the RoboCup competition is an interesting environment for studying and evaluating reinforcement learning methods. A known difficulty in applying reinforcement learning to robotics is the high number of experience samples required, being the use of simulated environments for training the agents followed by transfer learning to real-world (sim-to-real) a viable path. This article introduces an open-source simulator for the IEEE Very Small Size Soccer and the Small Size League optimized for reinforcement learning experiments. We also propose a framework for creating OpenAI Gym environments with a set of benchmarks tasks for evaluating single-agent and multi-agent robot soccer skills. We then demonstrate the learning capabilities of two state-of-the-art reinforcement learning methods as well as their limitations in certain scenarios introduced in this framework. We believe this will make it easier for more teams to compete in these categories using end-to-end reinforcement learning approaches and further develop this research area.
An analysis of Reinforcement Learning applied to Coach task in IEEE Very Small Size Soccer
Nov 23, 2020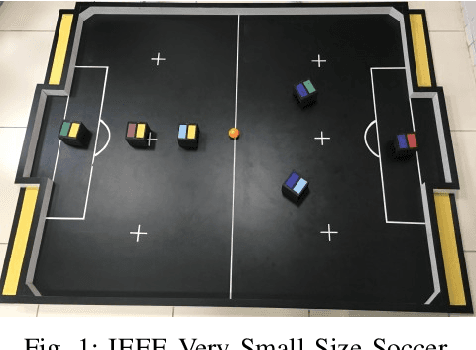
The IEEE Very Small Size Soccer (VSSS) is a robot soccer competition in which two teams of three small robots play against each other. Traditionally, a deterministic coach agent will choose the most suitable strategy and formation for each adversary's strategy. Therefore, the role of a coach is of great importance to the game. In this sense, this paper proposes an end-to-end approach for the coaching task based on Reinforcement Learning (RL). The proposed system processes the information during the simulated matches to learn an optimal policy that chooses the current formation, depending on the opponent and game conditions. We trained two RL policies against three different teams (balanced, offensive, and heavily offensive) in a simulated environment. Our results were assessed against one of the top teams of the VSSS league, showing promising results after achieving a win/loss ratio of approximately 2.0.
A Framework for Studying Reinforcement Learning and Sim-to-Real in Robot Soccer
Aug 18, 2020
This article introduces an open framework, called VSSS-RL, for studying Reinforcement Learning (RL) and sim-to-real in robot soccer, focusing on the IEEE Very Small Size Soccer (VSSS) league. We propose a simulated environment in which continuous or discrete control policies can be trained to control the complete behavior of soccer agents and a sim-to-real method based on domain adaptation to adapt the obtained policies to real robots. Our results show that the trained policies learned a broad repertoire of behaviors that are difficult to implement with handcrafted control policies. With VSSS-RL, we were able to beat human-designed policies in the 2019 Latin American Robotics Competition (LARC), achieving 4th place out of 21 teams, being the first to apply Reinforcement Learning (RL) successfully in this competition. Both environment and hardware specifications are available open-source to allow reproducibility of our results and further studies.
Deep Categorization with Semi-Supervised Self-Organizing Maps
Jun 17, 2020
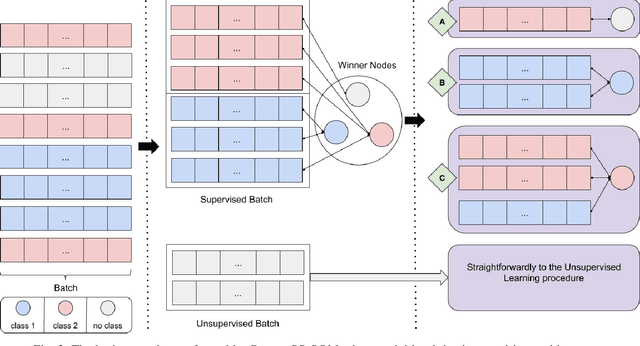
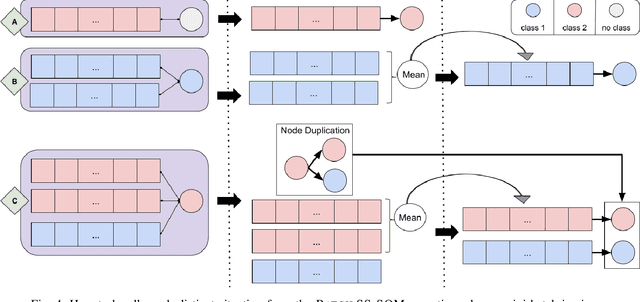
Nowadays, with the advance of technology, there is an increasing amount of unstructured data being generated every day. However, it is a painful job to label and organize it. Labeling is an expensive, time-consuming, and difficult task. It is usually done manually, which collaborates with the incorporation of noise and errors to the data. Hence, it is of great importance to developing intelligent models that can benefit from both labeled and unlabeled data. Currently, works on unsupervised and semi-supervised learning are still being overshadowed by the successes of purely supervised learning. However, it is expected that they become far more important in the longer term. This article presents a semi-supervised model, called Batch Semi-Supervised Self-Organizing Map (Batch SS-SOM), which is an extension of a SOM incorporating some advances that came with the rise of Deep Learning, such as batch training. The results show that Batch SS-SOM is a good option for semi-supervised classification and clustering. It performs well in terms of accuracy and clustering error, even with a small number of labeled samples, as well as when presented to unsupervised data, and shows competitive results in transfer learning scenarios in traditional image classification benchmark datasets.
Learning to Play Soccer by Reinforcement and Applying Sim-to-Real to Compete in the Real World
Mar 24, 2020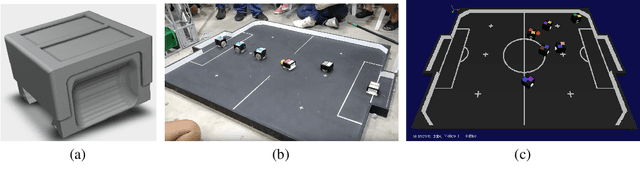
This work presents an application of Reinforcement Learning (RL) for the complete control of real soccer robots of the IEEE Very Small Size Soccer (VSSS), a traditional league in the Latin American Robotics Competition (LARC). In the VSSS league, two teams of three small robots play against each other. We propose a simulated environment in which continuous or discrete control policies can be trained, and a Sim-to-Real method to allow using the obtained policies to control a robot in the real world. The results show that the learned policies display a broad repertoire of behaviors that are difficult to specify by hand. This approach, called VSSS-RL, was able to beat the human-designed policy for the striker of the team ranked 3rd place in the 2018 LARC, in 1-vs-1 matches.
MOEA/D with Uniformly Randomly Adaptive Weights
Aug 15, 2019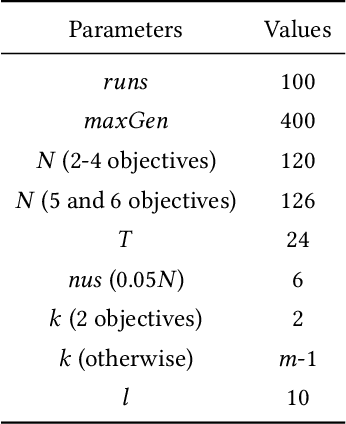
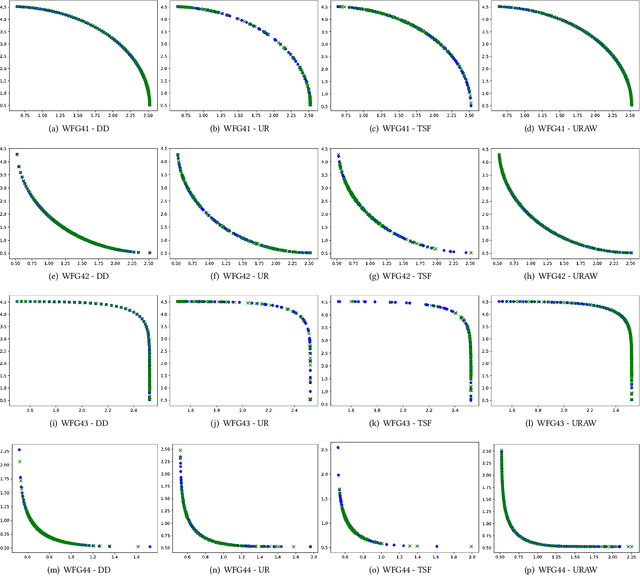
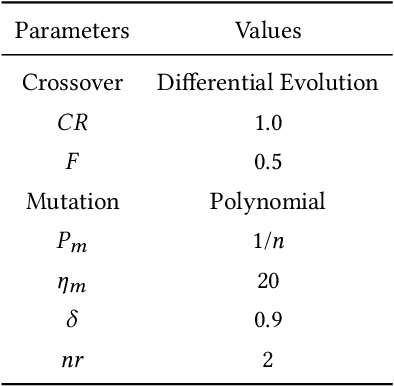
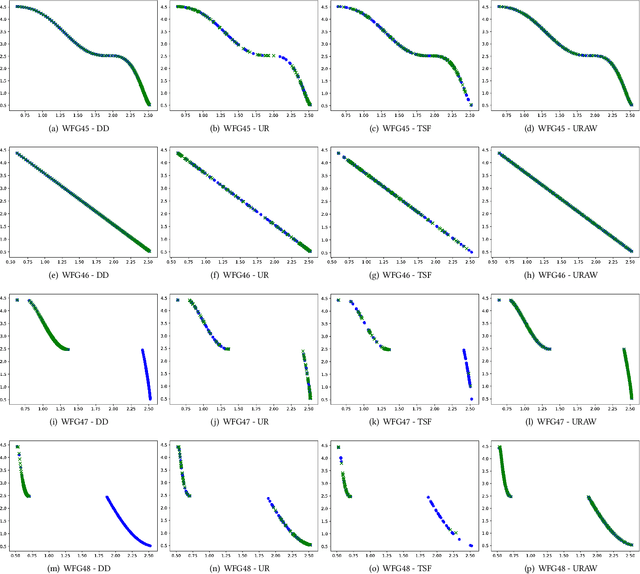
When working with decomposition-based algorithms, an appropriate set of weights might improve quality of the final solution. A set of uniformly distributed weights usually leads to well-distributed solutions on a Pareto front. However, there are two main difficulties with this approach. Firstly, it may fail depending on the problem geometry. Secondly, the population size becomes not flexible as the number of objectives increases. In this paper, we propose the MOEA/D with Uniformly Randomly Adaptive Weights (MOEA/DURAW) which uses the Uniformly Randomly method as an approach to subproblems generation, allowing a flexible population size even when working with many objective problems. During the evolutionary process, MOEA/D-URAW adds and removes subproblems as a function of the sparsity level of the population. Moreover, instead of requiring assumptions about the Pareto front shape, our method adapts its weights to the shape of the problem during the evolutionary process. Experimental results using WFG41-48 problem classes, with different Pareto front shapes, shows that the present method presents better or equal results in 77.5% of the problems evaluated from 2 to 6 objectives when compared with state-of-the-art methods in the literature.
Self-Organizing Maps with Variable Input Length for Motif Discovery and Word Segmentation
Aug 07, 2019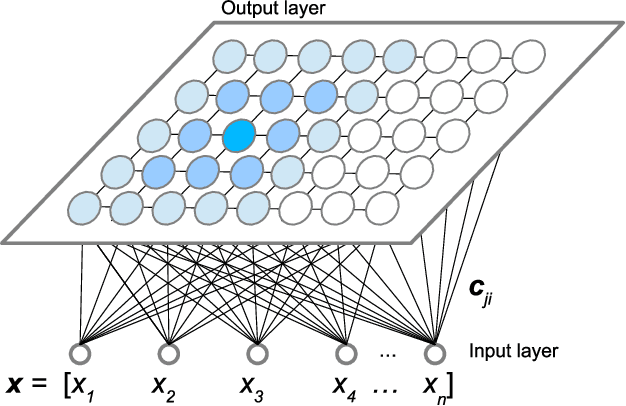

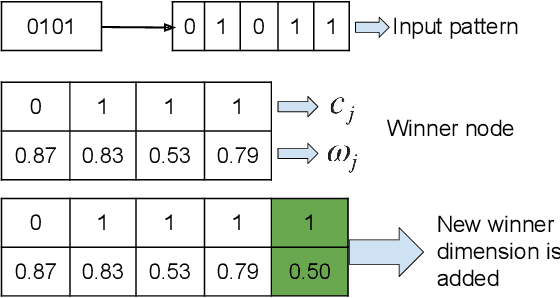

Time Series Motif Discovery (TSMD) is defined as searching for patterns that are previously unknown and appear with a given frequency in time series. Another problem strongly related with TSMD is Word Segmentation. This problem has received much attention from the community that studies early language acquisition in babies and toddlers. The development of biologically plausible models for word segmentation could greatly advance this field. Therefore, in this article, we propose the Variable Input Length Map (VILMAP) for Motif Discovery and Word Segmentation. The model is based on the Self-Organizing Maps and can identify Motifs with different lengths in time series. In our experiments, we show that VILMAP presents good results in finding Motifs in a standard Motif discovery dataset and can avoid catastrophic forgetting when trained with datasets with increasing values of input size. We also show that VILMAP achieves results similar or superior to other methods in the literature developed for the task of word segmentation.
Incremental Semantic Mapping with Unsupervised On-line Learning
Jul 11, 2019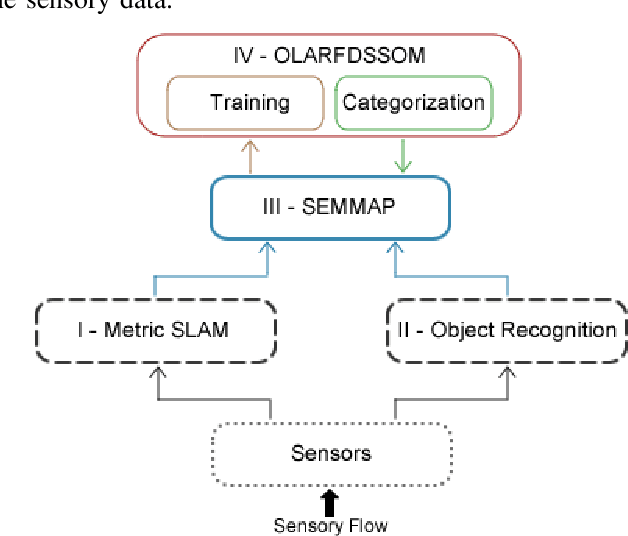
This paper introduces an incremental semantic mapping approach, with on-line unsupervised learning, based on Self-Organizing Maps (SOM) for robotic agents. The method includes a mapping module, which incrementally creates a topological map of the environment, enriched with objects recognized around each topological node, and a module of places categorization, endowed with an incremental unsupervised learning SOM with on-line training. The proposed approach was tested in experiments with real-world data, in which it demonstrates promising capabilities of incremental acquisition of topological maps enriched with semantic information, and for clustering together similar places based on this information. The approach was also able to continue learning from newly visited environments without degrading the information previously learned.