 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for Studying Reinforcement Learning and Sim-to-Real in Robot Soccer
Aug 18, 2020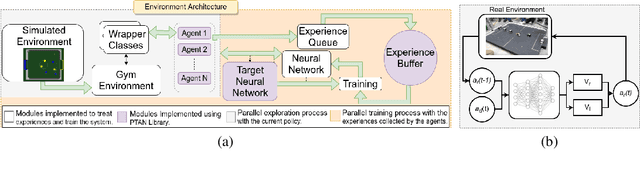
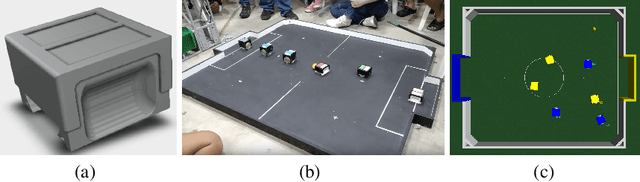
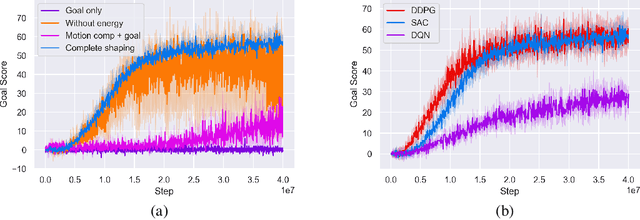
This article introduces an open framework, called VSSS-RL, for studying Reinforcement Learning (RL) and sim-to-real in robot soccer, focusing on the IEEE Very Small Size Soccer (VSSS) league. We propose a simulated environment in which continuous or discrete control policies can be trained to control the complete behavior of soccer agents and a sim-to-real method based on domain adaptation to adapt the obtained policies to real robots. Our results show that the trained policies learned a broad repertoire of behaviors that are difficult to implement with handcrafted control policies. With VSSS-RL, we were able to beat human-designed policies in the 2019 Latin American Robotics Competition (LARC), achieving 4th place out of 21 teams, being the first to apply Reinforcement Learning (RL) successfully in this competition. Both environment and hardware specifications are available open-source to allow reproducibility of our results and further studies.