 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning the path with Reinforcement Learning: Optimal Robot Motion Planning in RoboCup Small Size League Environments
Apr 23, 2024This work investigates the potential of Reinforcement Learning (RL) to tackle robot motion planning challenges in the dynamic RoboCup Small Size League (SSL). Using a heuristic control approach, we evaluate RL's effectiveness in obstacle-free and single-obstacle path-planning environments. Ablation studies reveal significant performance improvements. Our method achieved a 60% time gain in obstacle-free environments compared to baseline algorithms. Additionally, our findings demonstrated dynamic obstacle avoidance capabilities, adeptly navigating around moving blocks. These findings highlight the potential of RL to enhance robot motion planning in the challenging and unpredictable SSL environment.
rSoccer: A Framework for Studying Reinforcement Learning in Small and Very Small Size Robot Soccer
Jun 15, 2021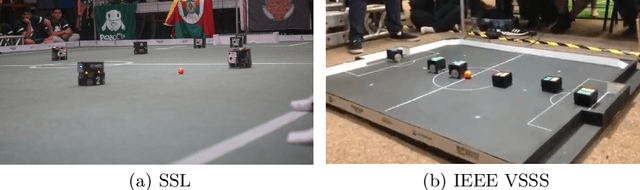

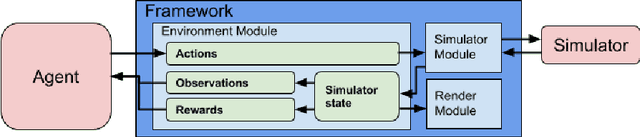
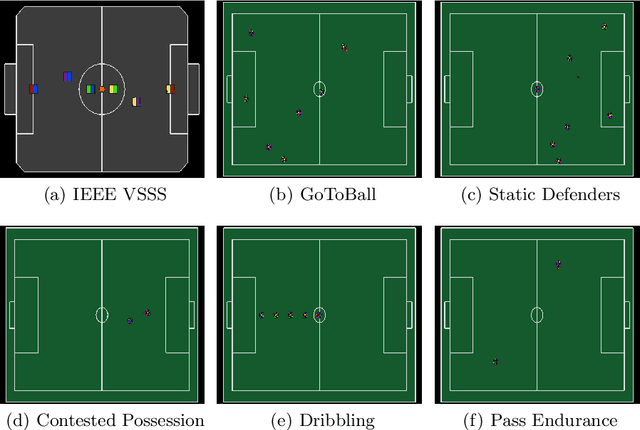
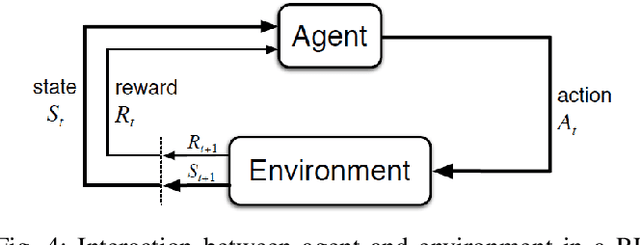
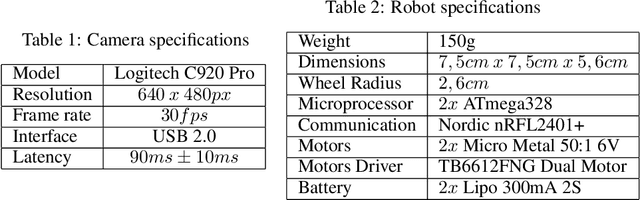
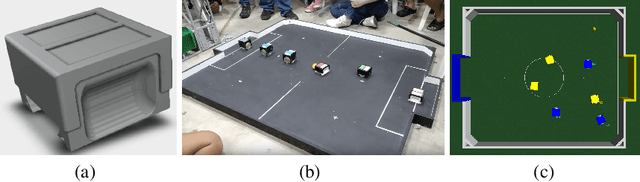
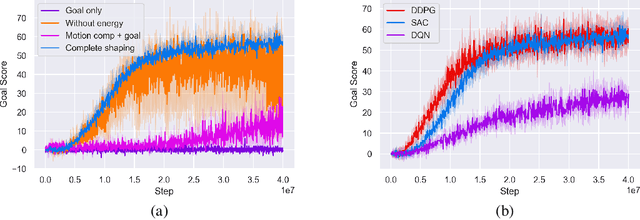
Reinforcement learning is an active research area with a vast number of applications in robotics, and the RoboCup competition is an interesting environment for studying and evaluating reinforcement learning methods. A known difficulty in applying reinforcement learning to robotics is the high number of experience samples required, being the use of simulated environments for training the agents followed by transfer learning to real-world (sim-to-real) a viable path. This article introduces an open-source simulator for the IEEE Very Small Size Soccer and the Small Size League optimized for reinforcement learning experiments. We also propose a framework for creating OpenAI Gym environments with a set of benchmarks tasks for evaluating single-agent and multi-agent robot soccer skills. We then demonstrate the learning capabilities of two state-of-the-art reinforcement learning methods as well as their limitations in certain scenarios introduced in this framework. We believe this will make it easier for more teams to compete in these categories using end-to-end reinforcement learning approaches and further develop this research area.
An analysis of Reinforcement Learning applied to Coach task in IEEE Very Small Size Soccer
Nov 23, 2020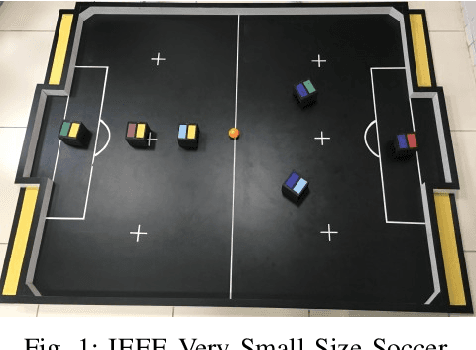
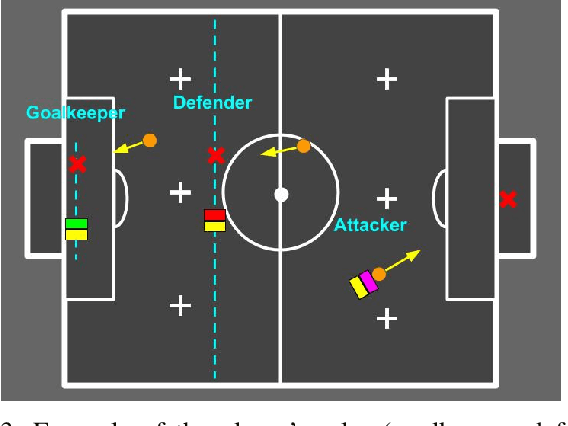
The IEEE Very Small Size Soccer (VSSS) is a robot soccer competition in which two teams of three small robots play against each other. Traditionally, a deterministic coach agent will choose the most suitable strategy and formation for each adversary's strategy. Therefore, the role of a coach is of great importance to the game. In this sense, this paper proposes an end-to-end approach for the coaching task based on Reinforcement Learning (RL). The proposed system processes the information during the simulated matches to learn an optimal policy that chooses the current formation, depending on the opponent and game conditions. We trained two RL policies against three different teams (balanced, offensive, and heavily offensive) in a simulated environment. Our results were assessed against one of the top teams of the VSSS league, showing promising results after achieving a win/loss ratio of approximately 2.0.
A Framework for Studying Reinforcement Learning and Sim-to-Real in Robot Soccer
Aug 18, 2020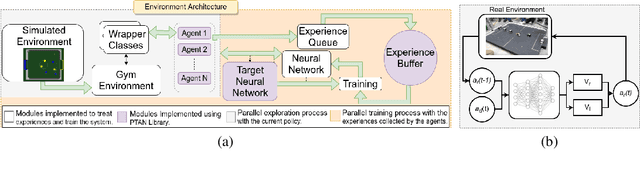
This article introduces an open framework, called VSSS-RL, for studying Reinforcement Learning (RL) and sim-to-real in robot soccer, focusing on the IEEE Very Small Size Soccer (VSSS) league. We propose a simulated environment in which continuous or discrete control policies can be trained to control the complete behavior of soccer agents and a sim-to-real method based on domain adaptation to adapt the obtained policies to real robots. Our results show that the trained policies learned a broad repertoire of behaviors that are difficult to implement with handcrafted control policies. With VSSS-RL, we were able to beat human-designed policies in the 2019 Latin American Robotics Competition (LARC), achieving 4th place out of 21 teams, being the first to apply Reinforcement Learning (RL) successfully in this competition. Both environment and hardware specifications are available open-source to allow reproducibility of our results and further studies.