 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopological Semantic Mapping by Consolidation of Deep Visual Features
Jun 24, 2021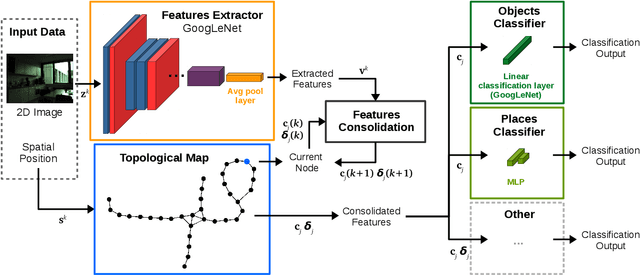
Many works in the recent literature introduce semantic mapping methods that use CNNs (Convolutional Neural Networks) to recognize semantic properties in images. The types of properties (eg.: room size, place category, and objects) and their classes (eg.: kitchen and bathroom, for place category) are usually predefined and restricted to a specific task. Thus, all the visual data acquired and processed during the construction of the maps are lost and only the recognized semantic properties remain on the maps. In contrast, this work introduces a topological semantic mapping method that uses deep visual features extracted by a CNN, the GoogLeNet, from 2D images captured in multiple views of the environment as the robot operates, to create consolidated representations of visual features acquired in the regions covered by each topological node. These consolidated representations allow flexible recognition of semantic properties of the regions and use in a range of visual tasks. The experiments, performed using a real-world indoor dataset, showed that the method is able to consolidate the visual features of regions and use them to recognize objects and place categories as semantic properties, and to indicate the topological location of images, with very promising results. The objects are classified using the classification layer of GoogLeNet, without retraining, and the place categories are recognized using a shallow Multilayer Perceptron.
Incremental Semantic Mapping with Unsupervised On-line Learning
Jul 11, 2019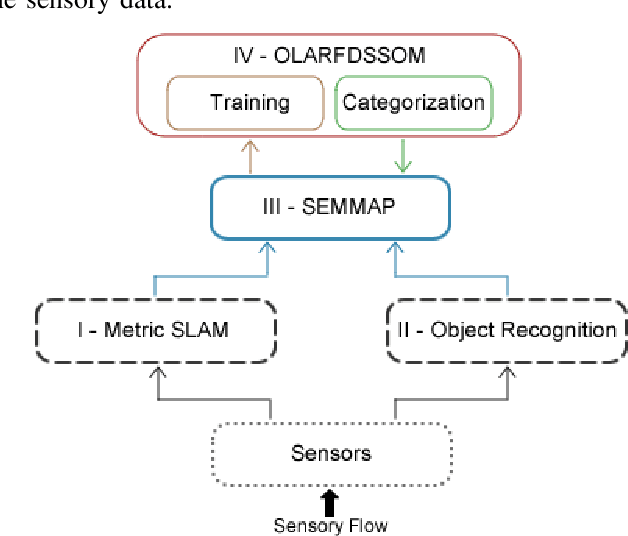
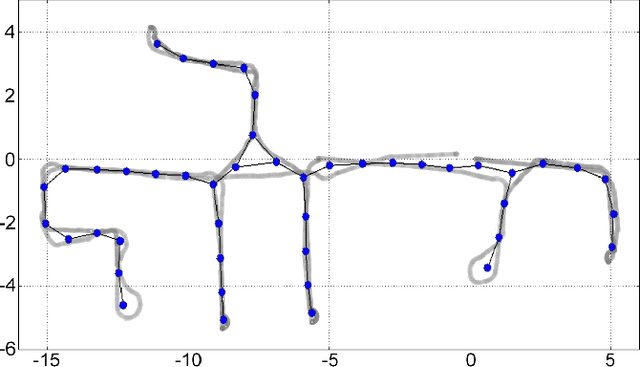
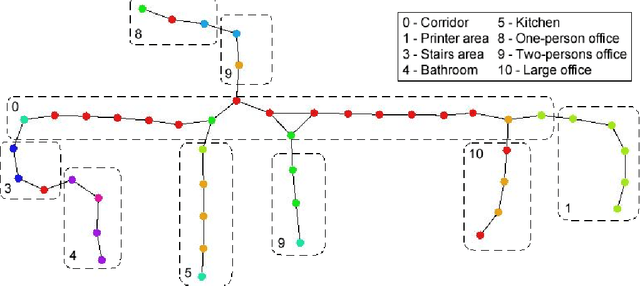
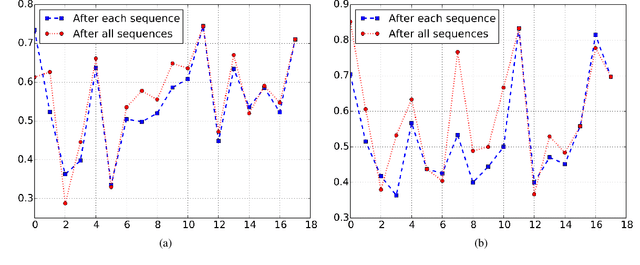
This paper introduces an incremental semantic mapping approach, with on-line unsupervised learning, based on Self-Organizing Maps (SOM) for robotic agents. The method includes a mapping module, which incrementally creates a topological map of the environment, enriched with objects recognized around each topological node, and a module of places categorization, endowed with an incremental unsupervised learning SOM with on-line training. The proposed approach was tested in experiments with real-world data, in which it demonstrates promising capabilities of incremental acquisition of topological maps enriched with semantic information, and for clustering together similar places based on this information. The approach was also able to continue learning from newly visited environments without degrading the information previously learned.