 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMamba Retriever: Utilizing Mamba for Effective and Efficient Dense Retrieval
Aug 15, 2024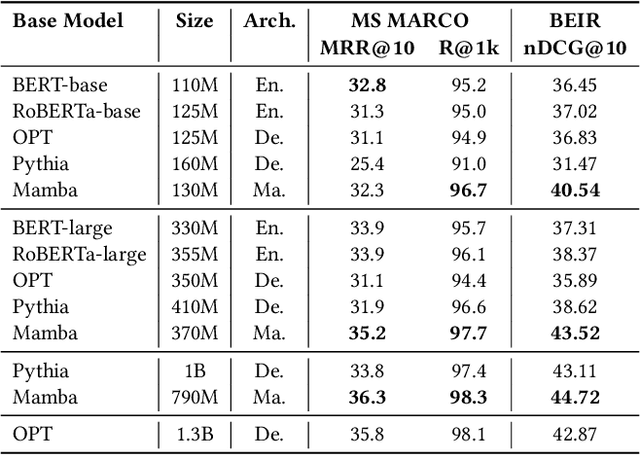
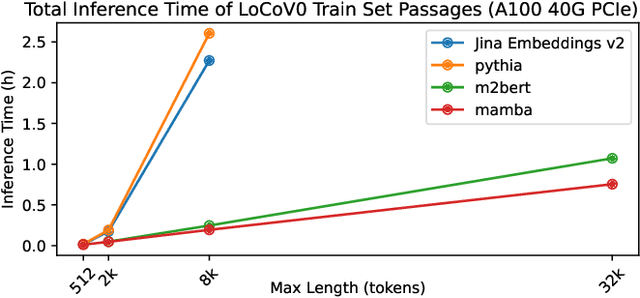

In the information retrieval (IR) area, dense retrieval (DR) models use deep learning techniques to encode queries and passages into embedding space to compute their semantic relations. It is important for DR models to balance both efficiency and effectiveness. Pre-trained language models (PLMs), especially Transformer-based PLMs, have been proven to be effective encoders of DR models. However, the self-attention component in Transformer-based PLM results in a computational complexity that grows quadratically with sequence length, and thus exhibits a slow inference speed for long-text retrieval. Some recently proposed non-Transformer PLMs, especially the Mamba architecture PLMs, have demonstrated not only comparable effectiveness to Transformer-based PLMs on generative language tasks but also better efficiency due to linear time scaling in sequence length. This paper implements the Mamba Retriever to explore whether Mamba can serve as an effective and efficient encoder of DR model for IR tasks. We fine-tune the Mamba Retriever on the classic short-text MS MARCO passage ranking dataset and the long-text LoCoV0 dataset. Experimental results show that (1) on the MS MARCO passage ranking dataset and BEIR, the Mamba Retriever achieves comparable or better effectiveness compared to Transformer-based retrieval models, and the effectiveness grows with the size of the Mamba model; (2) on the long-text LoCoV0 dataset, the Mamba Retriever can extend to longer text length than its pre-trained length after fine-tuning on retrieval task, and it has comparable or better effectiveness compared to other long-text retrieval models; (3) the Mamba Retriever has superior inference speed for long-text retrieval. In conclusion, Mamba Retriever is both effective and efficient, making it a practical model, especially for long-text retrieval.
Deep Learning-Based UAV Aerial Triangulation without Image Control Points
Jan 07, 2023



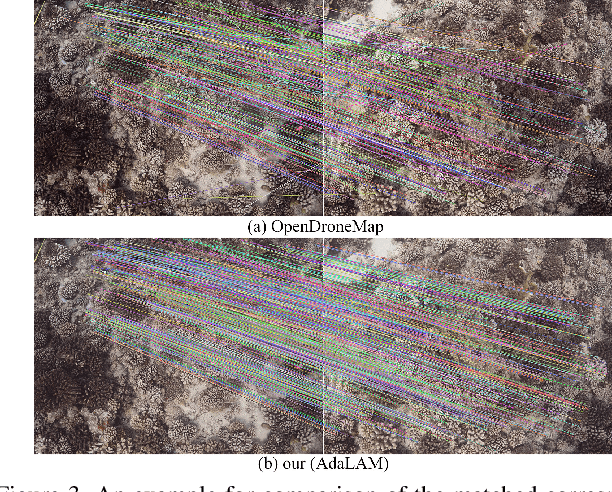
The emerging drone aerial survey has the advantages of low cost, high efficiency, and flexible use. However, UAVs are often equipped with cheap POS systems and non-measurement cameras, and their flight attitudes are easily affected. How to realize the large-scale mapping of UAV image-free control supported by POS faces many technical problems. The most basic and important core technology is how to accurately realize the absolute orientation of images through advanced aerial triangulation technology. In traditional aerial triangulation, image matching algorithms are constrained to varying degrees by preset prior knowledge. In recent years, deep learning has developed rapidly in the field of photogrammetric computer vision. It has surpassed the performance of traditional handcrafted features in many aspects. It has shown stronger stability in image-based navigation and positioning tasks, especially it has better resistance to unfavorable factors such as blur, illumination changes, and geometric distortion. Based on the introduction of the key technologies of aerial triangulation without image control points, this paper proposes a new drone image registration method based on deep learning image features to solve the problem of high mismatch rate in traditional methods. It adopts SuperPoint as the feature detector, uses the superior generalization performance of CNN to extract precise feature points from the UAV image, thereby achieving high-precision aerial triangulation. Experimental results show that under the same pre-processing and post-processing conditions, compared with the traditional method based on the SIFT algorithm, this method achieves suitable precision more efficiently, which can meet the requirements of UAV aerial triangulation without image control points in large-scale surveys.
Combining Photogrammetric Computer Vision and Semantic Segmentation for Fine-grained Understanding of Coral Reef Growth under Climate Change
Dec 08, 2022

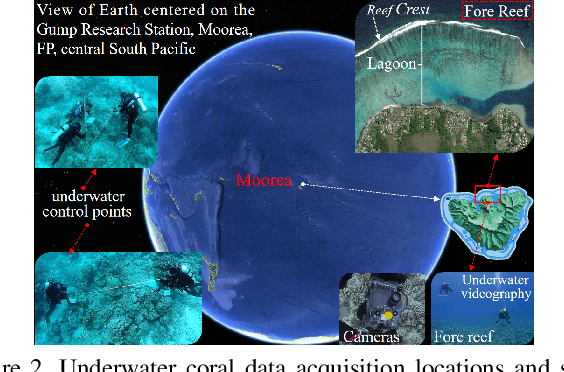
Corals are the primary habitat-building life-form on reefs that support a quarter of the species in the ocean. A coral reef ecosystem usually consists of reefs, each of which is like a tall building in any city. These reef-building corals secrete hard calcareous exoskeletons that give them structural rigidity, and are also a prerequisite for our accurate 3D modeling and semantic mapping using advanced photogrammetric computer vision and machine learning. Underwater videography as a modern underwater remote sensing tool is a high-resolution coral habitat survey and mapping technique. In this paper, detailed 3D mesh models, digital surface models and orthophotos of the coral habitat are generated from the collected coral images and underwater control points. Meanwhile, a novel pixel-wise semantic segmentation approach of orthophotos is performed by advanced deep learning. Finally, the semantic map is mapped into 3D space. For the first time, 3D fine-grained semantic modeling and rugosity evaluation of coral reefs have been completed at millimeter (mm) accuracy. This provides a new and powerful method for understanding the processes and characteristics of coral reef change at high spatial and temporal resolution under climate change.
The Teaching Dimension of Kernel Perceptron
Oct 27, 2020
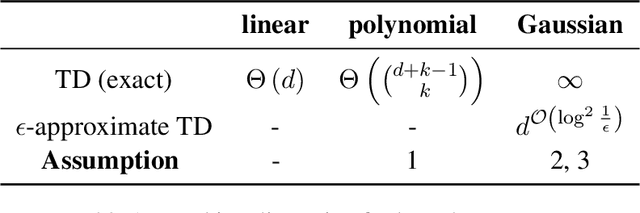
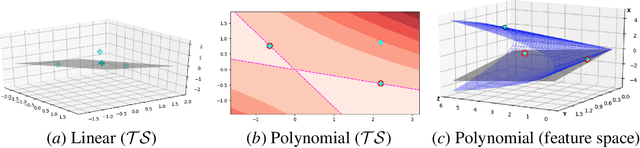
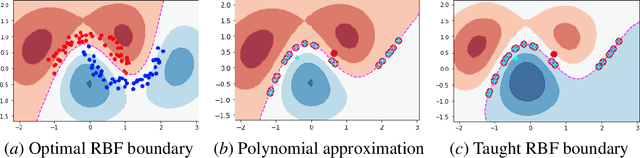
Algorithmic machine teaching has been studied under the linear setting where exact teaching is possible. However, little is known for teaching nonlinear learners. Here, we establish the sample complexity of teaching, aka teaching dimension, for kernelized perceptrons for different families of feature maps. As a warm-up, we show that the teaching complexity is $\Theta(d)$ for the exact teaching of linear perceptrons in $\mathbb{R}^d$, and $\Theta(d^k)$ for kernel perceptron with a polynomial kernel of order $k$. Furthermore, under certain smooth assumptions on the data distribution, we establish a rigorous bound on the complexity for approximately teaching a Gaussian kernel perceptron. We provide numerical examples of the optimal (approximate) teaching set under several canonical settings for linear, polynomial and Gaussian kernel perceptrons.