 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafeCast: Risk-Responsive Motion Forecasting for Autonomous Vehicles
Mar 28, 2025Accurate motion forecasting is essential for the safety and reliability of autonomous driving (AD) systems. While existing methods have made significant progress, they often overlook explicit safety constraints and struggle to capture the complex interactions among traffic agents, environmental factors, and motion dynamics. To address these challenges, we present SafeCast, a risk-responsive motion forecasting model that integrates safety-aware decision-making with uncertainty-aware adaptability. SafeCast is the first to incorporate the Responsibility-Sensitive Safety (RSS) framework into motion forecasting, encoding interpretable safety rules--such as safe distances and collision avoidance--based on traffic norms and physical principles. To further enhance robustness, we introduce the Graph Uncertainty Feature (GUF), a graph-based module that injects learnable noise into Graph Attention Networks, capturing real-world uncertainties and enhancing generalization across diverse scenarios. We evaluate SafeCast on four real-world benchmark datasets--Next Generation Simulation (NGSIM), Highway Drone (HighD), ApolloScape, and the Macao Connected Autonomous Driving (MoCAD)--covering highway, urban, and mixed-autonomy traffic environments. Our model achieves state-of-the-art (SOTA) accuracy while maintaining a lightweight architecture and low inference latency, underscoring its potential for real-time deployment in safety-critical AD systems.
CoT-Drive: Efficient Motion Forecasting for Autonomous Driving with LLMs and Chain-of-Thought Prompting
Mar 10, 2025
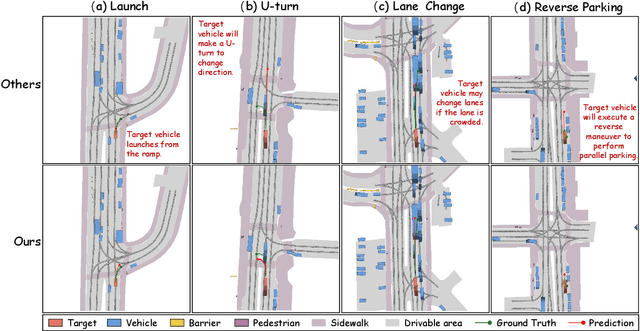
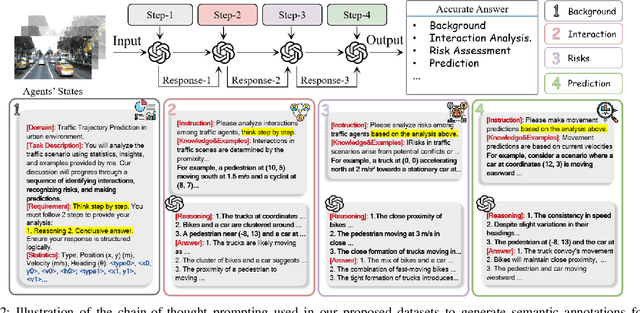

Accurate motion forecasting is crucial for safe autonomous driving (AD). This study proposes CoT-Drive, a novel approach that enhances motion forecasting by leveraging large language models (LLMs) and a chain-of-thought (CoT) prompting method. We introduce a teacher-student knowledge distillation strategy to effectively transfer LLMs' advanced scene understanding capabilities to lightweight language models (LMs), ensuring that CoT-Drive operates in real-time on edge devices while maintaining comprehensive scene understanding and generalization capabilities. By leveraging CoT prompting techniques for LLMs without additional training, CoT-Drive generates semantic annotations that significantly improve the understanding of complex traffic environments, thereby boosting the accuracy and robustness of predictions. Additionally, we present two new scene description datasets, Highway-Text and Urban-Text, designed for fine-tuning lightweight LMs to generate context-specific semantic annotations. Comprehensive evaluations of five real-world datasets demonstrate that CoT-Drive outperforms existing models, highlighting its effectiveness and efficiency in handling complex traffic scenarios. Overall, this study is the first to consider the practical application of LLMs in this field. It pioneers the training and use of a lightweight LLM surrogate for motion forecasting, setting a new benchmark and showcasing the potential of integrating LLMs into AD systems.
Characterized Diffusion and Spatial-Temporal Interaction Network for Trajectory Prediction in Autonomous Driving
May 03, 2024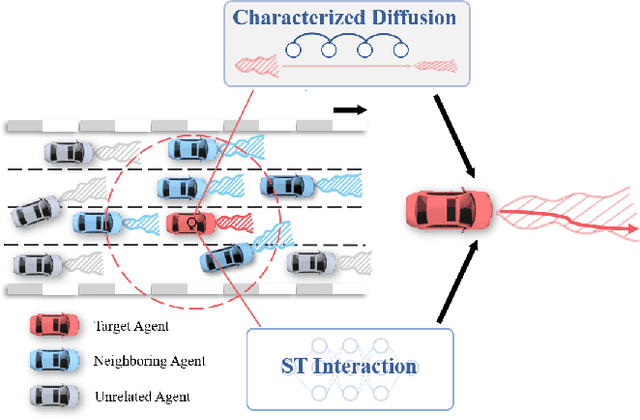
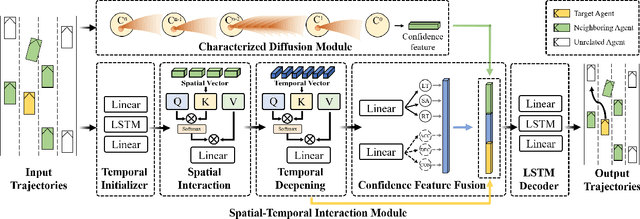
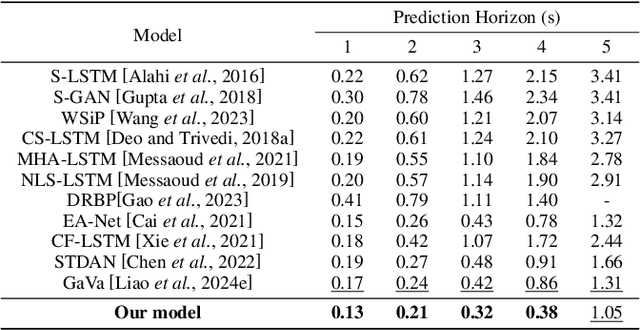
Trajectory prediction is a cornerstone in autonomous driving (AD), playing a critical role in enabling vehicles to navigate safely and efficiently in dynamic environments. To address this task, this paper presents a novel trajectory prediction model tailored for accuracy in the face of heterogeneous and uncertain traffic scenarios. At the heart of this model lies the Characterized Diffusion Module, an innovative module designed to simulate traffic scenarios with inherent uncertainty. This module enriches the predictive process by infusing it with detailed semantic information, thereby enhancing trajectory prediction accuracy. Complementing this, our Spatio-Temporal (ST) Interaction Module captures the nuanced effects of traffic scenarios on vehicle dynamics across both spatial and temporal dimensions with remarkable effectiveness. Demonstrated through exhaustive evaluations, our model sets a new standard in trajectory prediction, achieving state-of-the-art (SOTA) results on the Next Generation Simulation (NGSIM), Highway Drone (HighD), and Macao Connected Autonomous Driving (MoCAD) datasets across both short and extended temporal spans. This performance underscores the model's unparalleled adaptability and efficacy in navigating complex traffic scenarios, including highways, urban streets, and intersections.
A Cognitive-Driven Trajectory Prediction Model for Autonomous Driving in Mixed Autonomy Environment
Apr 26, 2024As autonomous driving technology progresses, the need for precise trajectory prediction models becomes paramount. This paper introduces an innovative model that infuses cognitive insights into trajectory prediction, focusing on perceived safety and dynamic decision-making. Distinct from traditional approaches, our model excels in analyzing interactions and behavior patterns in mixed autonomy traffic scenarios. It represents a significant leap forward, achieving marked performance improvements on several key datasets. Specifically, it surpasses existing benchmarks with gains of 16.2% on the Next Generation Simulation (NGSIM), 27.4% on the Highway Drone (HighD), and 19.8% on the Macao Connected Autonomous Driving (MoCAD) dataset. Our proposed model shows exceptional proficiency in handling corner cases, essential for real-world applications. Moreover, its robustness is evident in scenarios with missing or limited data, outperforming most of the state-of-the-art baselines. This adaptability and resilience position our model as a viable tool for real-world autonomous driving systems, heralding a new standard in vehicle trajectory prediction for enhanced safety and efficiency.