 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen, Where, and What? A Novel Benchmark for Accident Anticipation and Localization with Large Language Models
Jul 26, 2024



As autonomous driving systems increasingly become part of daily transportation, the ability to accurately anticipate and mitigate potential traffic accidents is paramount. Traditional accident anticipation models primarily utilizing dashcam videos are adept at predicting when an accident may occur but fall short in localizing the incident and identifying involved entities. Addressing this gap, this study introduces a novel framework that integrates Large Language Models (LLMs) to enhance predictive capabilities across multiple dimensions--what, when, and where accidents might occur. We develop an innovative chain-based attention mechanism that dynamically adjusts to prioritize high-risk elements within complex driving scenes. This mechanism is complemented by a three-stage model that processes outputs from smaller models into detailed multimodal inputs for LLMs, thus enabling a more nuanced understanding of traffic dynamics. Empirical validation on the DAD, CCD, and A3D datasets demonstrates superior performance in Average Precision (AP) and Mean Time-To-Accident (mTTA), establishing new benchmarks for accident prediction technology. Our approach not only advances the technological framework for autonomous driving safety but also enhances human-AI interaction, making predictive insights generated by autonomous systems more intuitive and actionable.
Characterized Diffusion and Spatial-Temporal Interaction Network for Trajectory Prediction in Autonomous Driving
May 03, 2024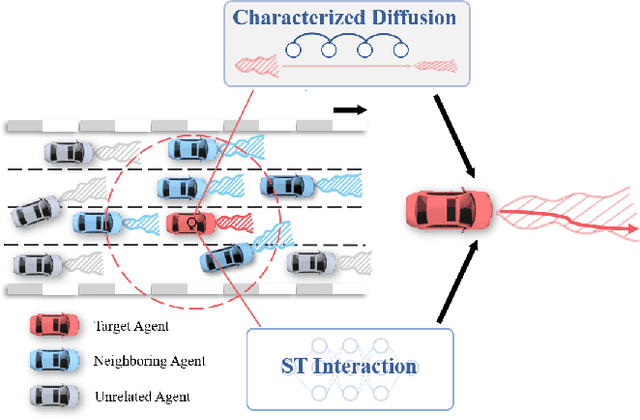
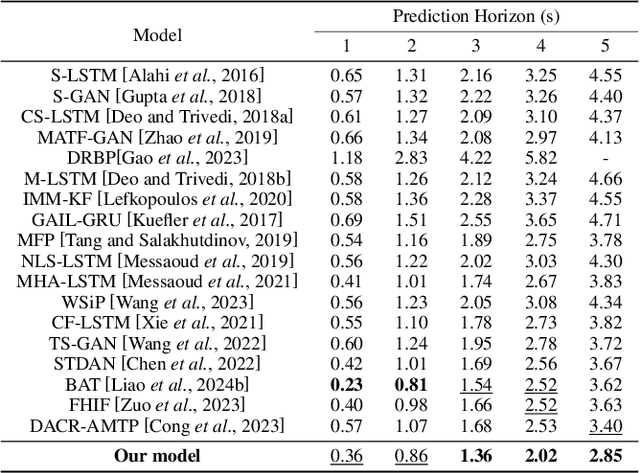
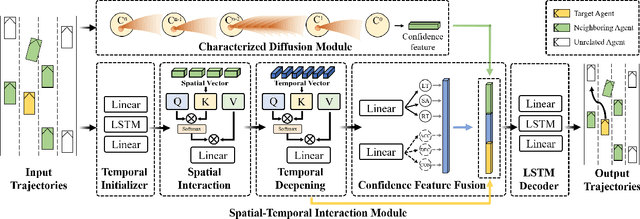
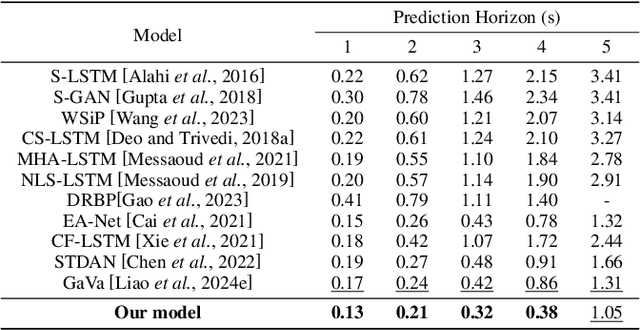
Trajectory prediction is a cornerstone in autonomous driving (AD), playing a critical role in enabling vehicles to navigate safely and efficiently in dynamic environments. To address this task, this paper presents a novel trajectory prediction model tailored for accuracy in the face of heterogeneous and uncertain traffic scenarios. At the heart of this model lies the Characterized Diffusion Module, an innovative module designed to simulate traffic scenarios with inherent uncertainty. This module enriches the predictive process by infusing it with detailed semantic information, thereby enhancing trajectory prediction accuracy. Complementing this, our Spatio-Temporal (ST) Interaction Module captures the nuanced effects of traffic scenarios on vehicle dynamics across both spatial and temporal dimensions with remarkable effectiveness. Demonstrated through exhaustive evaluations, our model sets a new standard in trajectory prediction, achieving state-of-the-art (SOTA) results on the Next Generation Simulation (NGSIM), Highway Drone (HighD), and Macao Connected Autonomous Driving (MoCAD) datasets across both short and extended temporal spans. This performance underscores the model's unparalleled adaptability and efficacy in navigating complex traffic scenarios, including highways, urban streets, and intersections.