 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFasterPose: A Faster Simple Baseline for Human Pose Estimation
Jul 07, 2021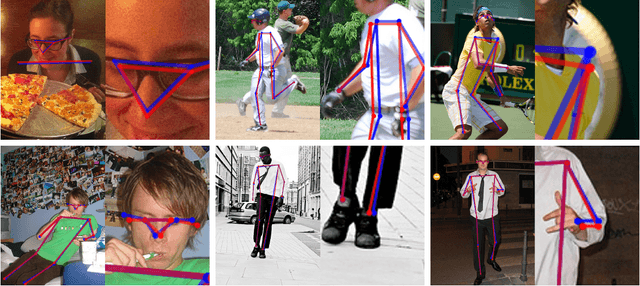
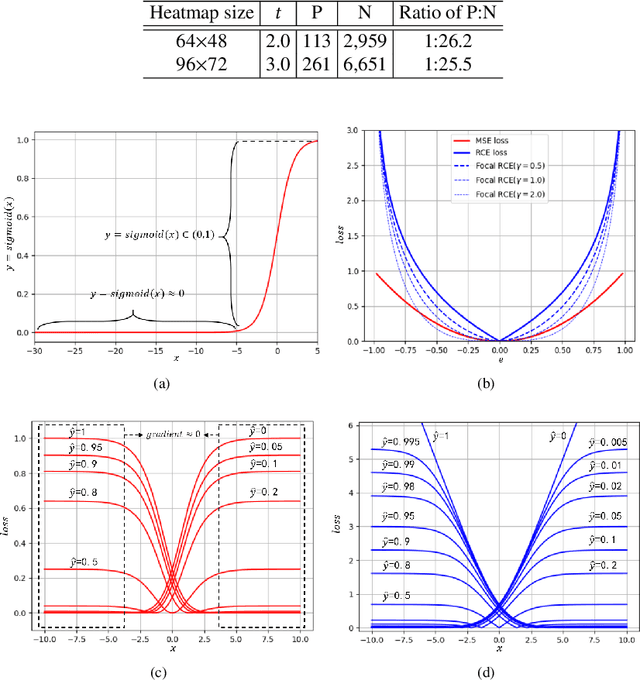
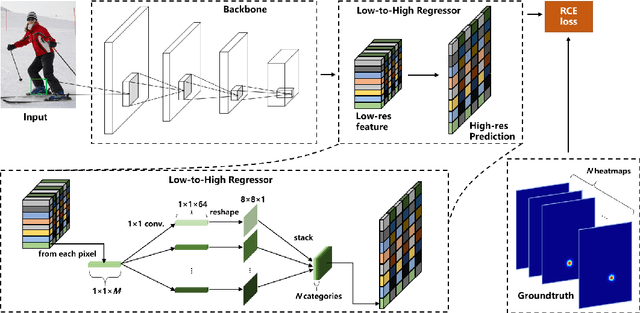

The performance of human pose estimation depends on the spatial accuracy of keypoint localization. Most existing methods pursue the spatial accuracy through learning the high-resolution (HR) representation from input images. By the experimental analysis, we find that the HR representation leads to a sharp increase of computational cost, while the accuracy improvement remains marginal compared with the low-resolution (LR) representation. In this paper, we propose a design paradigm for cost-effective network with LR representation for efficient pose estimation, named FasterPose. Whereas the LR design largely shrinks the model complexity, yet how to effectively train the network with respect to the spatial accuracy is a concomitant challenge. We study the training behavior of FasterPose, and formulate a novel regressive cross-entropy (RCE) loss function for accelerating the convergence and promoting the accuracy. The RCE loss generalizes the ordinary cross-entropy loss from the binary supervision to a continuous range, thus the training of pose estimation network is able to benefit from the sigmoid function. By doing so, the output heatmap can be inferred from the LR features without loss of spatial accuracy, while the computational cost and model size has been significantly reduced. Compared with the previously dominant network of pose estimation, our method reduces 58% of the FLOPs and simultaneously gains 1.3% improvement of accuracy. Extensive experiments show that FasterPose yields promising results on the common benchmarks, i.e., COCO and MPII, consistently validating the effectiveness and efficiency for practical utilization, especially the low-latency and low-energy-budget applications in the non-GPU scenarios.
Joint COCO and Mapillary Workshop at ICCV 2019 Keypoint Detection Challenge Track Technical Report: Distribution-Aware Coordinate Representation for Human Pose Estimation
Mar 13, 2020



In this paper, we focus on the coordinate representation in human pose estimation. While being the standard choice, heatmap based representation has not been systematically investigated. We found that the process of coordinate decoding (i.e. transforming the predicted heatmaps to the coordinates) is surprisingly significant for human pose estimation performance, which nevertheless was not recognised before. In light of the discovered importance, we further probe the design limitations of the standard coordinate decoding method and propose a principled distribution-aware decoding method. Meanwhile, we improve the standard coordinate encoding process (i.e. transforming ground-truth coordinates to heatmaps) by generating accurate heatmap distributions for unbiased model training. Taking them together, we formulate a novel Distribution-Aware coordinate Representation for Keypoint (DARK) method. Serving as a model-agnostic plug-in, DARK significantly improves the performance of a variety of state-of-the-art human pose estimation models. Extensive experiments show that DARK yields the best results on COCO keypoint detection challenge, validating the usefulness and effectiveness of our novel coordinate representation idea. The project page containing more details is at https://ilovepose.github.io/coco
Distribution-Aware Coordinate Representation for Human Pose Estimation
Oct 14, 2019



While being the de facto standard coordinate representation in human pose estimation, heatmap is never systematically investigated in the literature, to our best knowledge. This work fills this gap by studying the coordinate representation with a particular focus on the heatmap. Interestingly, we found that the process of decoding the predicted heatmaps into the final joint coordinates in the original image space is surprisingly significant for human pose estimation performance, which nevertheless was not recognised before. In light of the discovered importance, we further probe the design limitations of the standard coordinate decoding method widely used by existing methods, and propose a more principled distribution-aware decoding method. Meanwhile, we improve the standard coordinate encoding process (i.e. transforming ground-truth coordinates to heatmaps) by generating accurate heatmap distributions for unbiased model training. Taking the two together, we formulate a novel Distribution-Aware coordinate Representation of Keypoint (DARK) method. Serving as a model-agnostic plug-in, DARK significantly improves the performance of a variety of state-of-the-art human pose estimation models. Extensive experiments show that DARK yields the best results on two common benchmarks, MPII and COCO, consistently validating the usefulness and effectiveness of our novel coordinate representation idea.