 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHessian-informed machine learning interatomic potential towards bridging theory and experiments
Mar 26, 2026Local curvature of potential energy surfaces is critical for predicting certain experimental observables of molecules and materials from first principles, yet it remains far beyond reach for complex systems. In this work, we introduce a Hessian-informed Machine Learning Interatomic Potential (Hi-MLIP) that captures such curvature reliably, thereby enabling accurate analysis of associated thermodynamic and kinetic phenomena. To make Hessian supervision practically viable, we develop a highly efficient training protocol, termed Hessian INformed Training (HINT), achieving two to four orders of magnitude reduction for the requirement of expensive Hessian labels. HINT integrates critical techniques, including Hessian pre-training, configuration sampling, curriculum learning and stochastic projection Hessian loss. Enabled by HINT, Hi-MLIP significantly improves transition-state search and brings Gibbs free-energy predictions close to chemical accuracy especially in data-scarce regimes. Our framework also enables accurate treatment of strongly anharmonic hydrides, reproducing phonon renormalization and superconducting critical temperatures in close agreement with experiment while bypassing the computational bottleneck of anharmonic calculations. These results establish a practical route to enhancing curvature awareness of machine learning interatomic potentials, bridging simulation and experimental observables across a wide range of systems.
AlphaNet: Scaling Up Local Frame-based Atomistic Foundation Model
Jan 13, 2025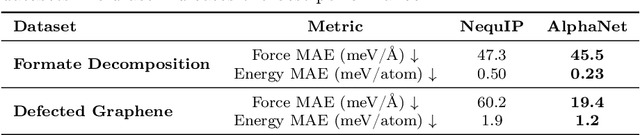
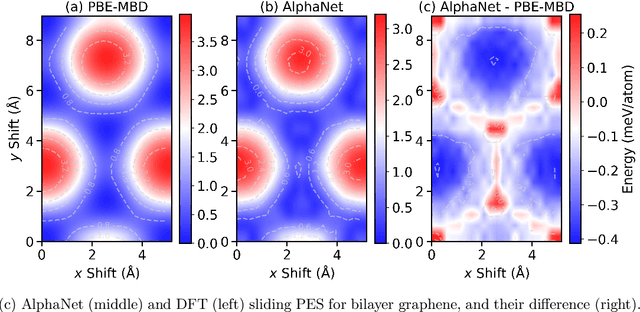
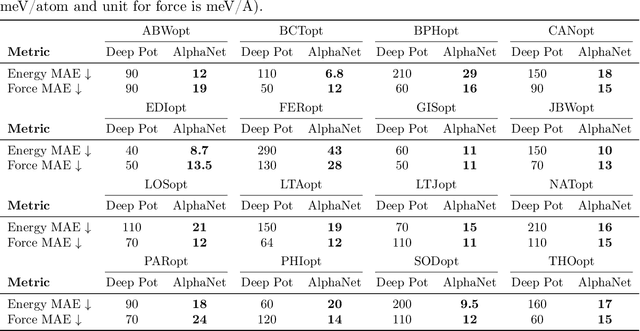
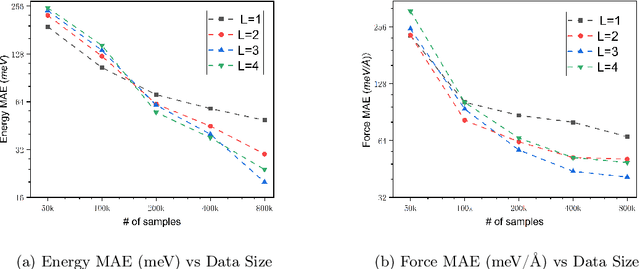
We present AlphaNet, a local frame-based equivariant model designed to achieve both accurate and efficient simulations for atomistic systems. Recently, machine learning force fields (MLFFs) have gained prominence in molecular dynamics simulations due to their advantageous efficiency-accuracy balance compared to classical force fields and quantum mechanical calculations, alongside their transferability across various systems. Despite the advancements in improving model accuracy, the efficiency and scalability of MLFFs remain significant obstacles in practical applications. AlphaNet enhances computational efficiency and accuracy by leveraging the local geometric structures of atomic environments through the construction of equivariant local frames and learnable frame transitions. We substantiate the efficacy of AlphaNet across diverse datasets, including defected graphene, formate decomposition, zeolites, and surface reactions. AlphaNet consistently surpasses well-established models, such as NequIP and DeepPot, in terms of both energy and force prediction accuracy. Notably, AlphaNet offers one of the best trade-offs between computational efficiency and accuracy among existing models. Moreover, AlphaNet exhibits scalability across a broad spectrum of system and dataset sizes, affirming its versatility.
EL-MLFFs: Ensemble Learning of Machine Leaning Force Fields
Mar 26, 2024



Machine learning force fields (MLFFs) have emerged as a promising approach to bridge the accuracy of quantum mechanical methods and the efficiency of classical force fields. However, the abundance of MLFF models and the challenge of accurately predicting atomic forces pose significant obstacles in their practical application. In this paper, we propose a novel ensemble learning framework, EL-MLFFs, which leverages the stacking method to integrate predictions from diverse MLFFs and enhance force prediction accuracy. By constructing a graph representation of molecular structures and employing a graph neural network (GNN) as the meta-model, EL-MLFFs effectively captures atomic interactions and refines force predictions. We evaluate our approach on two distinct datasets: methane molecules and methanol adsorbed on a Cu(100) surface. The results demonstrate that EL-MLFFs significantly improves force prediction accuracy compared to individual MLFFs, with the ensemble of all eight models yielding the best performance. Moreover, our ablation study highlights the crucial roles of the residual network and graph attention layers in the model's architecture. The EL-MLFFs framework offers a promising solution to the challenges of model selection and force prediction accuracy in MLFFs, paving the way for more reliable and efficient molecular simulations.
AI Online Filters to Real World Image Recognition
Feb 11, 2020
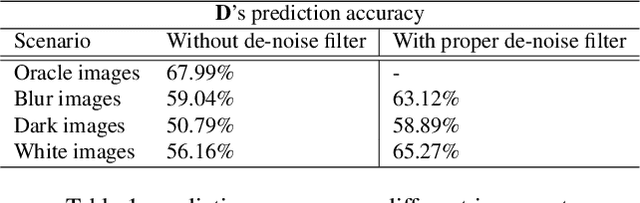
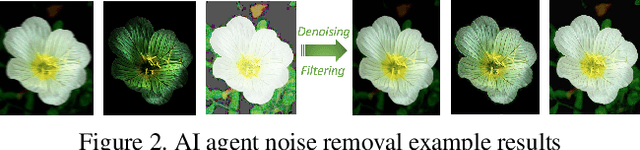
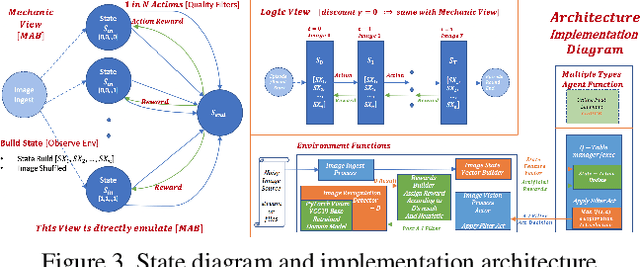
Deep artificial neural networks, trained with labeled data sets are widely used in numerous vision and robotics applications today. In terms of AI, these are called reflex models, referring to the fact that they do not self-evolve or actively adapt to environmental changes. As demand for intelligent robot control expands to many high level tasks, reinforcement learning and state based models play an increasingly important role. Herein, in computer vision and robotics domain, we study a novel approach to add reinforcement controls onto the image recognition reflex models to attain better overall performance, specifically to a wider environment range beyond what is expected of the task reflex models. Follow a common infrastructure with environment sensing and AI based modeling of self-adaptive agents, we implement multiple types of AI control agents. To the end, we provide comparative results of these agents with baseline, and an insightful analysis of their benefit to improve overall image recognition performance in real world.
Online Learning to Estimate Warfarin Dose with Contextual Linear Bandits
Jul 11, 2019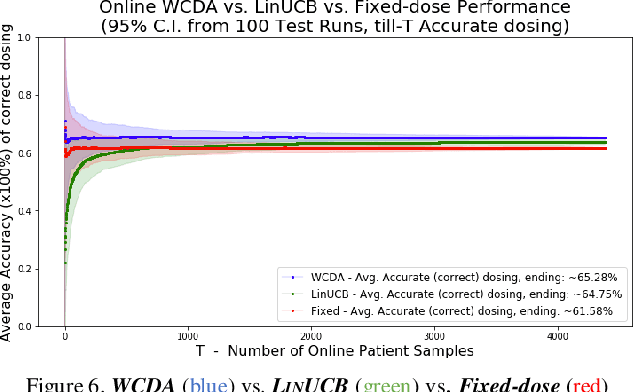
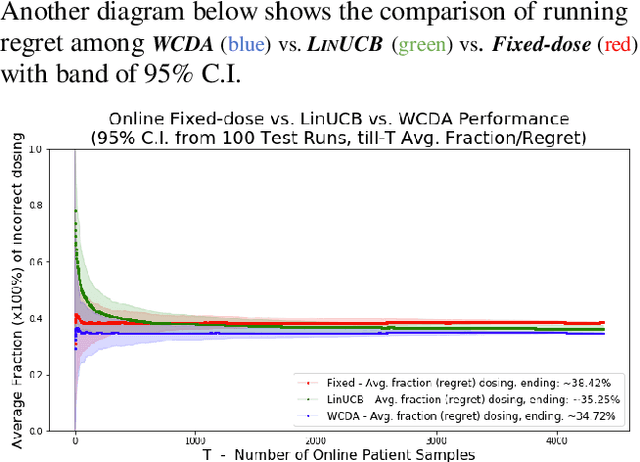
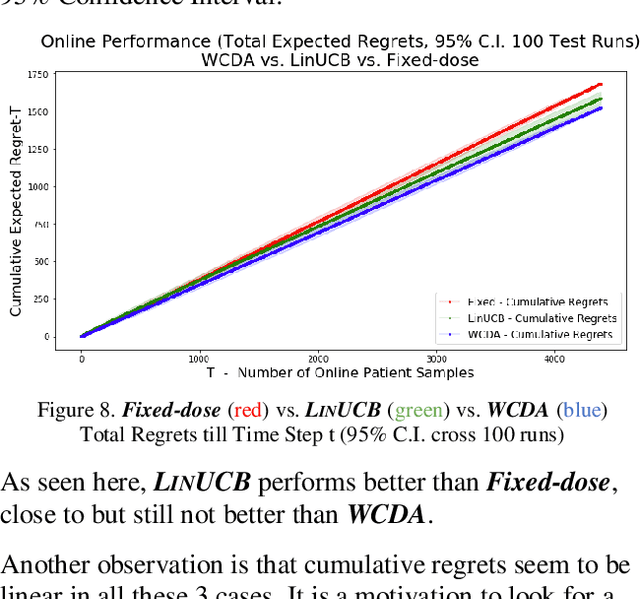
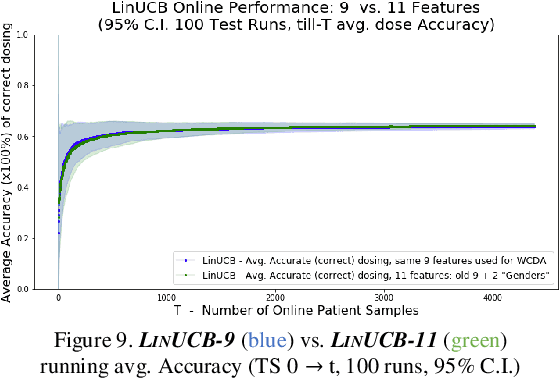
Warfarin is one of the most commonly used oral blood anticoagulant agent in the world, the proper dose of Warfarin is difficult to establish not only because it is substantially variant among patients, but also adverse even severe consequences of taking an incorrect dose. Typical practice is to prescribe an initial dose, then doctor closely monitor patient response and adjust accordingly to the correct dosage. The three commonly used strategies for an initial dosage are the fixed-dose approach, the Warfarin Clinical algorithm, and the Pharmacogenetic algorithm developed by the IWPC (International Warfarin Pharmacogenetics Consortium). It is always best to prescribe correct initial dosage, motivated by this challenge, this work explores the performance of multi-armed bandit algorithms to best predict the correct dosage of Warfarin instead of trial-and-error procedure. Real data from the Pharmacogenetics and Pharmacogenomics Knowledge Base (PharmGKB) is used, with it a series of linear bandit algorithms and variants are developed and evaluated on Warfarin dataset. All proposed algorithms outperformed the fixed-dose baseline algorithm, and some even matched up the Warfarin Clinical Dosing Algorithm. In addition, a few promising future directions are given for further exploration and development.