 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI Online Filters to Real World Image Recognition
Feb 11, 2020
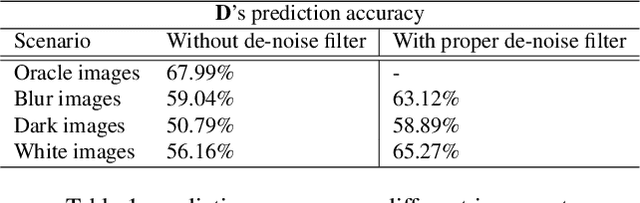
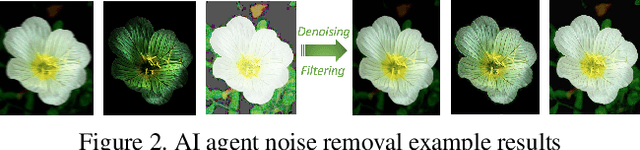
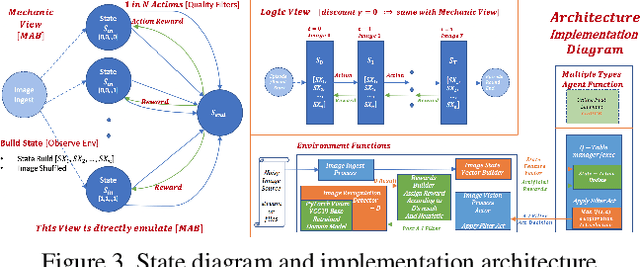
Deep artificial neural networks, trained with labeled data sets are widely used in numerous vision and robotics applications today. In terms of AI, these are called reflex models, referring to the fact that they do not self-evolve or actively adapt to environmental changes. As demand for intelligent robot control expands to many high level tasks, reinforcement learning and state based models play an increasingly important role. Herein, in computer vision and robotics domain, we study a novel approach to add reinforcement controls onto the image recognition reflex models to attain better overall performance, specifically to a wider environment range beyond what is expected of the task reflex models. Follow a common infrastructure with environment sensing and AI based modeling of self-adaptive agents, we implement multiple types of AI control agents. To the end, we provide comparative results of these agents with baseline, and an insightful analysis of their benefit to improve overall image recognition performance in real world.