 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpressive and Scalable Quantum Fusion for Multimodal Learning
Oct 08, 2025The aim of this paper is to introduce a quantum fusion mechanism for multimodal learning and to establish its theoretical and empirical potential. The proposed method, called the Quantum Fusion Layer (QFL), replaces classical fusion schemes with a hybrid quantum-classical procedure that uses parameterized quantum circuits to learn entangled feature interactions without requiring exponential parameter growth. Supported by quantum signal processing principles, the quantum component efficiently represents high-order polynomial interactions across modalities with linear parameter scaling, and we provide a separation example between QFL and low-rank tensor-based methods that highlights potential quantum query advantages. In simulation, QFL consistently outperforms strong classical baselines on small but diverse multimodal tasks, with particularly marked improvements in high-modality regimes. These results suggest that QFL offers a fundamentally new and scalable approach to multimodal fusion that merits deeper exploration on larger systems.
A novel framework for adaptive stress testing of autonomous vehicles in highways
Feb 19, 2024



Guaranteeing the safe operations of autonomous vehicles (AVs) is crucial for their widespread adoption and public acceptance. It is thus of a great significance to not only assess the AV against the standard safety tests, but also discover potential corner cases of the AV under test that could lead to unsafe behaviour or scenario. In this paper, we propose a novel framework to systematically explore corner cases that can result in safety concerns in a highway traffic scenario. The framework is based on an adaptive stress testing (AST) approach, an emerging validation method that leverages a Markov decision process to formulate the scenarios and deep reinforcement learning (DRL) to discover the desirable patterns representing corner cases. To this end, we develop a new reward function for DRL to guide the AST in identifying crash scenarios based on the collision probability estimate between the AV under test (i.e., the ego vehicle) and the trajectory of other vehicles on the highway. The proposed framework is further integrated with a new driving model enabling us to create more realistic traffic scenarios capturing both the longitudinal and lateral movements of vehicles on the highway. In our experiment, we calibrate our model using real-world crash statistics involving automated vehicles in California, and then we analyze the characteristics of the AV and the framework. Quantitative and qualitative analyses of our experimental results demonstrate that our framework outperforms other existing AST schemes. The study can help discover crash scenarios of AV that are unknown or absent in human driving, thereby enhancing the safety and trustworthiness of AV technology.
Traffic4cast at NeurIPS 2021 -- Temporal and Spatial Few-Shot Transfer Learning in Gridded Geo-Spatial Processes
Apr 01, 2022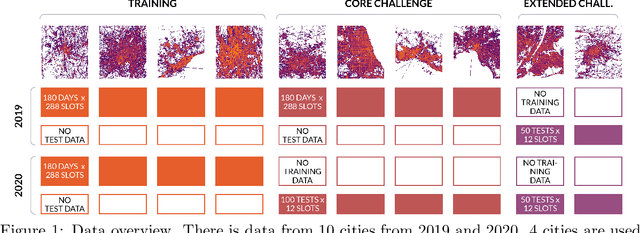

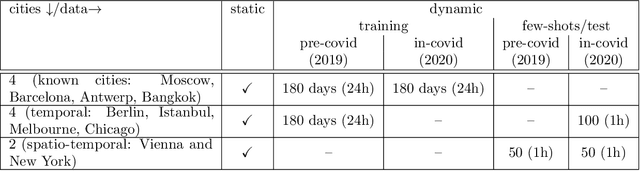
The IARAI Traffic4cast competitions at NeurIPS 2019 and 2020 showed that neural networks can successfully predict future traffic conditions 1 hour into the future on simply aggregated GPS probe data in time and space bins. We thus reinterpreted the challenge of forecasting traffic conditions as a movie completion task. U-Nets proved to be the winning architecture, demonstrating an ability to extract relevant features in this complex real-world geo-spatial process. Building on the previous competitions, Traffic4cast 2021 now focuses on the question of model robustness and generalizability across time and space. Moving from one city to an entirely different city, or moving from pre-COVID times to times after COVID hit the world thus introduces a clear domain shift. We thus, for the first time, release data featuring such domain shifts. The competition now covers ten cities over 2 years, providing data compiled from over 10^12 GPS probe data. Winning solutions captured traffic dynamics sufficiently well to even cope with these complex domain shifts. Surprisingly, this seemed to require only the previous 1h traffic dynamic history and static road graph as input.
Traffic4cast -- Large-scale Traffic Prediction using 3DResNet and Sparse-UNet
Nov 10, 2021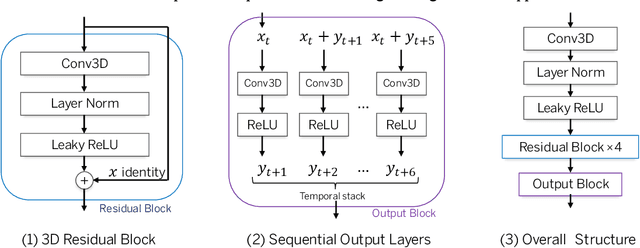
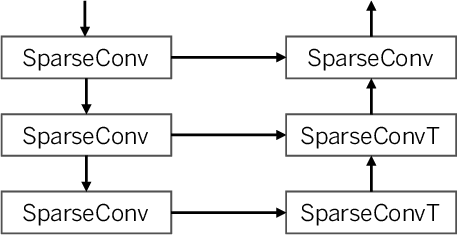
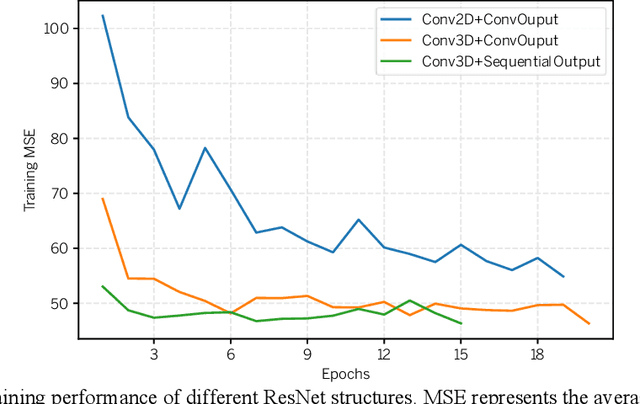

The IARAI competition Traffic4cast 2021 aims to predict short-term city-wide high-resolution traffic states given the static and dynamic traffic information obtained previously. The aim is to build a machine learning model for predicting the normalized average traffic speed and flow of the subregions of multiple large-scale cities using historical data points. The model is supposed to be generic, in a way that it can be applied to new cities. By considering spatiotemporal feature learning and modeling efficiency, we explore 3DResNet and Sparse-UNet approaches for the tasks in this competition. The 3DResNet based models use 3D convolution to learn the spatiotemporal features and apply sequential convolutional layers to enhance the temporal relationship of the outputs. The Sparse-UNet model uses sparse convolutions as the backbone for spatiotemporal feature learning. Since the latter algorithm mainly focuses on non-zero data points of the inputs, it dramatically reduces the computation time, while maintaining a competitive accuracy. Our results show that both of the proposed models achieve much better performance than the baseline algorithms. The codes and pretrained models are available at https://github.com/resuly/Traffic4Cast-2021.
A novel activity pattern generation incorporating deep learning for transport demand models
Apr 06, 2021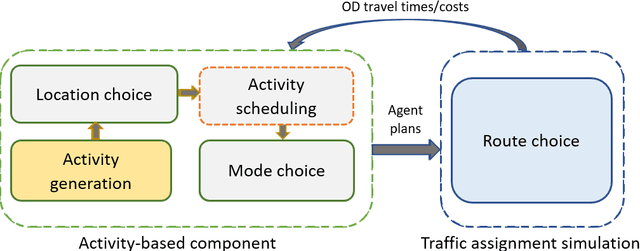
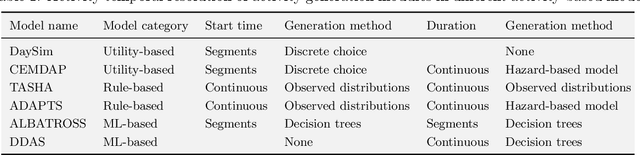


Activity generation plays an important role in activity-based demand modelling systems. While machine learning, especially deep learning, has been increasingly used for mode choice and traffic flow prediction, much less research exploiting the advantage of deep learning for activity generation tasks. This paper proposes a novel activity pattern generation framework by incorporating deep learning with travel domain knowledge. We model each activity schedule as one primary activity tour and several secondary activity tours. We then develop different deep neural networks with entity embedding and random forest models to classify activity type, as well as to predict activity times. The proposed framework can capture the activity patterns for individuals in both training and validation sets. Results show high accuracy for the start time and end time of work and school activities. The framework also replicates the start time patterns of stop-before and stop-after primary work activity well. This provides a promising direction to deploy advanced machine learning methods to generate more reliable activity-travel patterns for transport demand systems and their applications.
Boosted Genetic Algorithm using Machine Learning for traffic control optimization
Mar 11, 2021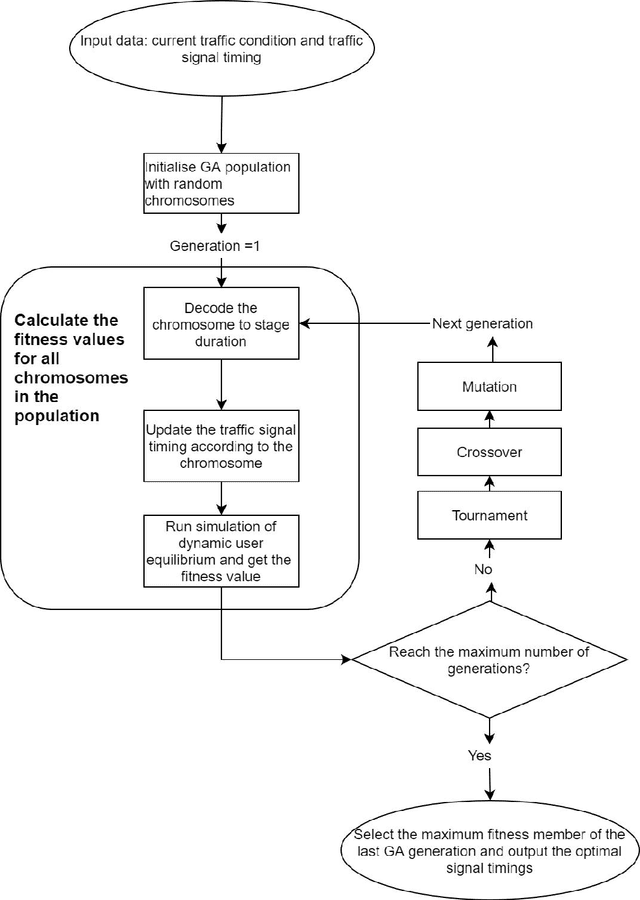
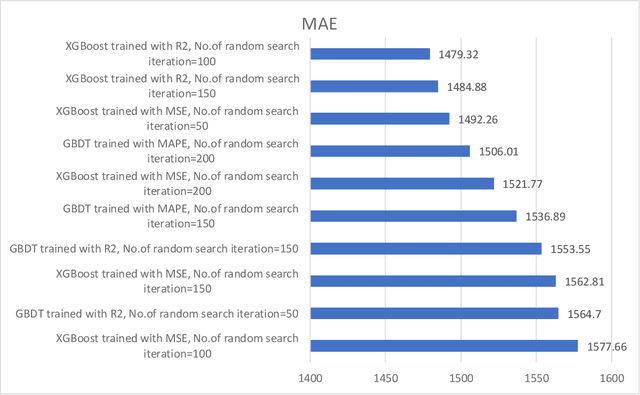
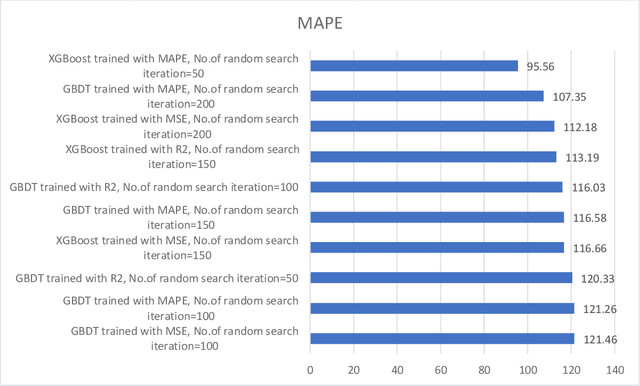
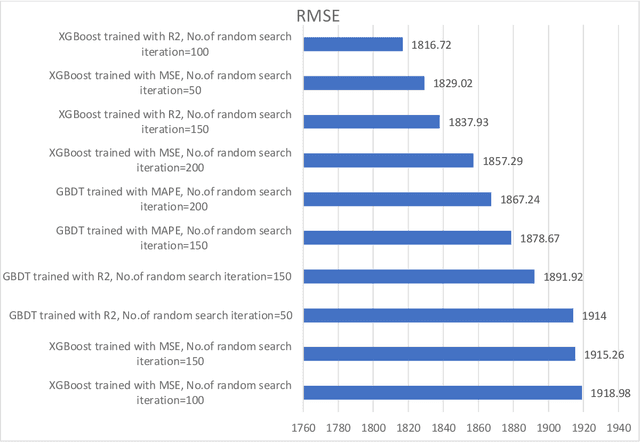
Traffic control optimization is a challenging task for various traffic centers around the world and the majority of existing approaches focus only on developing adaptive methods under normal (recurrent) traffic conditions. Optimizing the control plans when severe incidents occur still remains an open problem, especially when a high number of lanes or entire intersections are affected. This paper aims at tackling this problem and presents a novel methodology for optimizing the traffic signal timings in signalized urban intersections, under non-recurrent traffic incidents. With the purpose of producing fast and reliable decisions, we combine the fast running Machine Learning (ML) algorithms and the reliable Genetic Algorithms (GA) into a single optimization framework. As a benchmark, we first start with deploying a typical GA algorithm by considering the phase duration as the decision variable and the objective function to minimize the total travel time in the network. We fine tune the GA for crossover, mutation, fitness calculation and obtain the optimal parameters. Secondly, we train various machine learning regression models to predict the total travel time of the studied traffic network, and select the best performing regressor which we further hyper-tune to find the optimal training parameters. Lastly, we propose a new algorithm BGA-ML combining the GA algorithm and the extreme-gradient decision-tree, which is the best performing regressor, together in a single optimization framework. Comparison and results show that the new BGA-ML is much faster than the original GA algorithm and can be successfully applied under non-recurrent incident conditions.