 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Estimation and Prediction of City-wide Delivery Demand: A Large Language Model Empowered Graph-based Learning Approach
Aug 30, 2024The proliferation of e-commerce and urbanization has significantly intensified delivery operations in urban areas, boosting the volume and complexity of delivery demand. Data-driven predictive methods, especially those utilizing machine learning techniques, have emerged to handle these complexities in urban delivery demand management problems. One particularly pressing problem that has not yet been sufficiently studied is the joint estimation and prediction of city-wide delivery demand. To this end, we formulate this problem as a graph-based spatiotemporal learning task. First, a message-passing neural network model is formalized to capture the interaction between demand patterns of associated regions. Second, by exploiting recent advances in large language models, we extract general geospatial knowledge encodings from the unstructured locational data and integrate them into the demand predictor. Last, to encourage the cross-city transferability of the model, an inductive training scheme is developed in an end-to-end routine. Extensive empirical results on two real-world delivery datasets, including eight cities in China and the US, demonstrate that our model significantly outperforms state-of-the-art baselines in these challenging tasks.
Channel-Aware Low-Rank Adaptation in Time Series Forecasting
Jul 24, 2024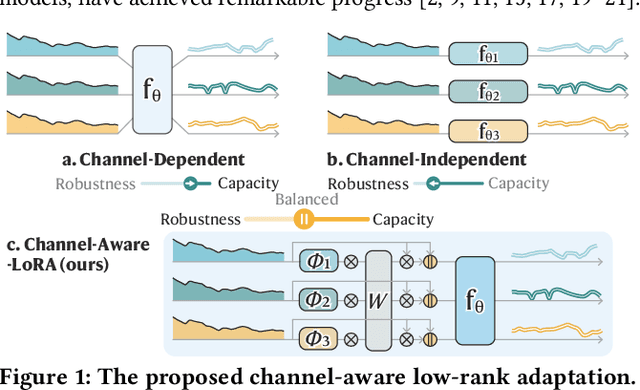
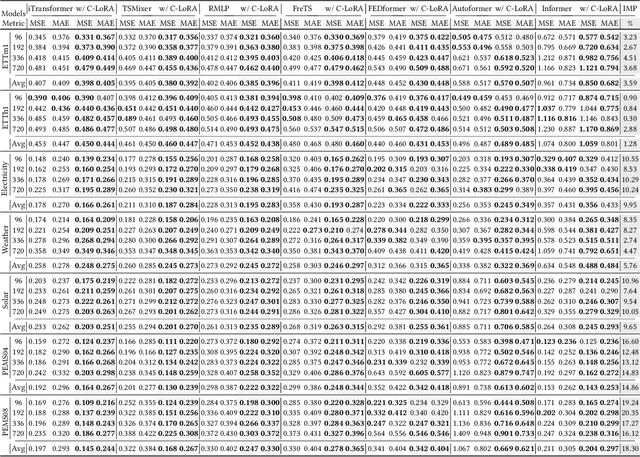
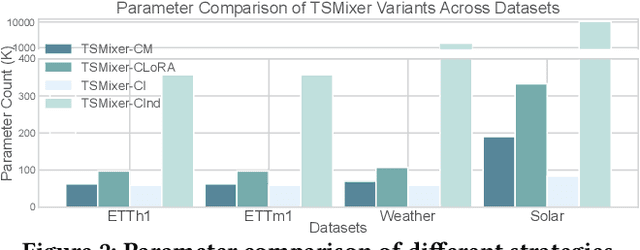
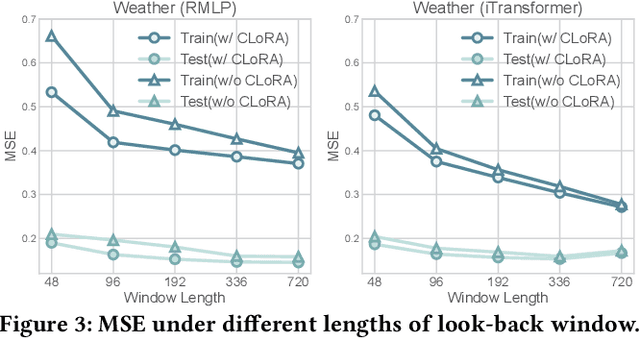
The balance between model capacity and generalization has been a key focus of recent discussions in long-term time series forecasting. Two representative channel strategies are closely associated with model expressivity and robustness, including channel independence (CI) and channel dependence (CD). The former adopts individual channel treatment and has been shown to be more robust to distribution shifts, but lacks sufficient capacity to model meaningful channel interactions. The latter is more expressive for representing complex cross-channel dependencies, but is prone to overfitting. To balance the two strategies, we present a channel-aware low-rank adaptation method to condition CD models on identity-aware individual components. As a plug-in solution, it is adaptable for a wide range of backbone architectures. Extensive experiments show that it can consistently and significantly improve the performance of both CI and CD models with demonstrated efficiency and flexibility. The code is available at https://github.com/tongnie/C-LoRA.
Generalizable Implicit Neural Representation As a Universal Spatiotemporal Traffic Data Learner
Jun 13, 2024
$\textbf{This is the conference version of our paper: Spatiotemporal Implicit Neural Representation as a Generalized Traffic Data Learner}$. Spatiotemporal Traffic Data (STTD) measures the complex dynamical behaviors of the multiscale transportation system. Existing methods aim to reconstruct STTD using low-dimensional models. However, they are limited to data-specific dimensions or source-dependent patterns, restricting them from unifying representations. Here, we present a novel paradigm to address the STTD learning problem by parameterizing STTD as an implicit neural representation. To discern the underlying dynamics in low-dimensional regimes, coordinate-based neural networks that can encode high-frequency structures are employed to directly map coordinates to traffic variables. To unravel the entangled spatial-temporal interactions, the variability is decomposed into separate processes. We further enable modeling in irregular spaces such as sensor graphs using spectral embedding. Through continuous representations, our approach enables the modeling of a variety of STTD with a unified input, thereby serving as a generalized learner of the underlying traffic dynamics. It is also shown that it can learn implicit low-rank priors and smoothness regularization from the data, making it versatile for learning different dominating data patterns. We validate its effectiveness through extensive experiments in real-world scenarios, showcasing applications from corridor to network scales. Empirical results not only indicate that our model has significant superiority over conventional low-rank models, but also highlight that the versatility of the approach. We anticipate that this pioneering modeling perspective could lay the foundation for universal representation of STTD in various real-world tasks. $\textbf{The full version can be found at:}$ https://doi.org/10.48550/arXiv.2405.03185.
ImputeFormer: Graph Transformers for Generalizable Spatiotemporal Imputation
Dec 04, 2023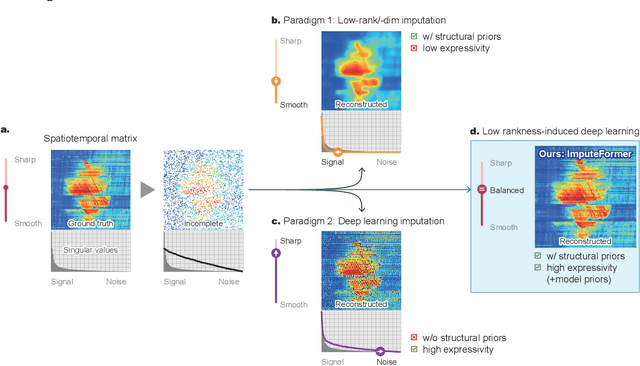
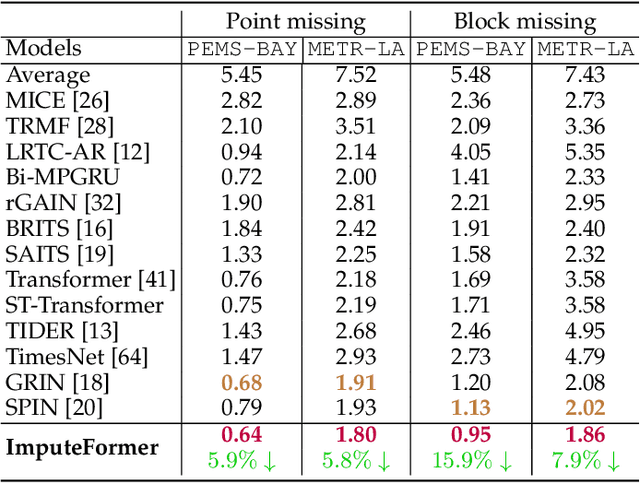
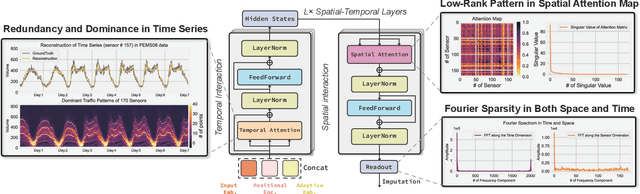
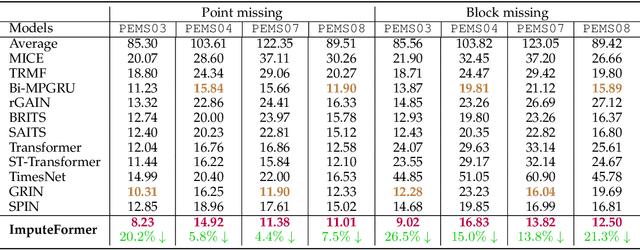
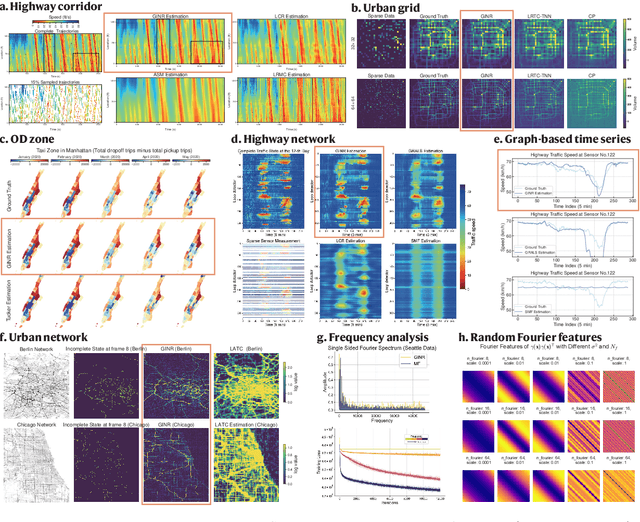
This paper focuses on the multivariate time series imputation problem using deep neural architectures. The ubiquitous issue of missing data in both scientific and engineering tasks necessitates the development of an effective and general imputation model. Leveraging the wisdom and expertise garnered from low-rank imputation methods, we power the canonical Transformers with three key knowledge-driven enhancements, including projected temporal attention, global adaptive graph convolution, and Fourier imputation loss. These task-agnostic inductive biases exploit the inherent structures of incomplete time series, and thus make our model versatile for a variety of imputation problems. We demonstrate its superiority in terms of accuracy, efficiency, and flexibility on heterogeneous datasets, including traffic speed, traffic volume, solar energy, smart metering, and air quality. Comprehensive case studies are performed to further strengthen the interpretability. Promising empirical results provide strong conviction that incorporating time series primitives, such as low-rank properties, can substantially facilitate the development of a generalizable model to approach a wide range of spatiotemporal imputation problems.
Nexus sine qua non: Essentially connected neural networks for spatial-temporal forecasting of multivariate time series
Jul 04, 2023



Modeling and forecasting multivariate time series not only facilitates the decision making of practitioners, but also deepens our scientific understanding of the underlying dynamical systems. Spatial-temporal graph neural networks (STGNNs) are emerged as powerful predictors and have become the de facto models for learning spatiotemporal representations in recent years. However, existing architectures of STGNNs tend to be complicated by stacking a series of fancy layers. The designed models could be either redundant or enigmatic, which pose great challenges on their complexity and scalability. Such concerns prompt us to re-examine the designs of modern STGNNs and identify core principles that contribute to a powerful and efficient neural predictor. Here we present a compact predictive model that is fully defined by a dense encoder-decoder and a message-passing layer, powered by node identifications, without any complex sequential modules, e.g., TCNs, RNNs, and Transformers. Empirical results demonstrate how a simple and elegant model with proper inductive basis can compare favorably w.r.t. the state of the art with elaborate designs, while being much more interpretable and computationally efficient for spatial-temporal forecasting problem. We hope our findings would open new horizons for future studies to revisit the design of more concise neural forecasting architectures.
A Macro-Micro Approach to Reconstructing Vehicle Trajectories on Multi-Lane Freeways with Lane Changing
Jun 09, 2023



Vehicle trajectories can offer the most precise and detailed depiction of traffic flow and serve as a critical component in traffic management and control applications. Various technologies have been applied to reconstruct vehicle trajectories from sparse fixed and mobile detection data. However, existing methods predominantly concentrate on single-lane scenarios and neglect lane-changing (LC) behaviors that occur across multiple lanes, which limit their applicability in practical traffic systems. To address this research gap, we propose a macro-micro approach for reconstructing complete vehicle trajectories on multi-lane freeways, wherein the macro traffic state information and micro driving models are integrated to overcome the restrictions imposed by lane boundary. Particularly, the macroscopic velocity contour maps are established for each lane to regulate the movement of vehicle platoons, meanwhile the velocity difference between adjacent lanes provide valuable criteria for guiding LC behaviors. Simultaneously, the car-following models are extended from micro perspective to supply lane-based candidate trajectories and define the plausible range for LC positions. Later, a two-stage trajectory fusion algorithm is proposed to jointly infer both the car-following and LC behaviors, in which the optimal LC positions is identified and candidate trajectories are adjusted according to their weights. The proposed framework was evaluated using NGSIM dataset, and the results indicated a remarkable enhancement in both the accuracy and smoothness of reconstructed trajectories, with performance indicators reduced by over 30% compared to two representative reconstruction methods. Furthermore, the reconstruction process effectively reproduced LC behaviors across contiguous lanes, adding to the framework's comprehensiveness and realism.
Towards better traffic volume estimation: Tackling both underdetermined and non-equilibrium problems via a correlation-adaptive graph convolution network
Mar 14, 2023



Traffic volume is an indispensable ingredient to provide fine-grained information for traffic management and control. However, due to limited deployment of traffic sensors, obtaining full-scale volume information is far from easy. Existing works on this topic primarily focus on improving the overall estimation accuracy of a particular method and ignore the underlying challenges of volume estimation, thereby having inferior performances on some critical tasks. This paper studies two key problems with regard to traffic volume estimation: (1) underdetermined traffic flows caused by undetected movements, and (2) non-equilibrium traffic flows arise from congestion propagation. Here we demonstrate a graph-based deep learning method that can offer a data-driven, model-free and correlation adaptive approach to tackle the above issues and perform accurate network-wide traffic volume estimation. Particularly, in order to quantify the dynamic and nonlinear relationships between traffic speed and volume for the estimation of underdetermined flows, a speed patternadaptive adjacent matrix based on graph attention is developed and integrated into the graph convolution process, to capture non-local correlations between sensors. To measure the impacts of non-equilibrium flows, a temporal masked and clipped attention combined with a gated temporal convolution layer is customized to capture time-asynchronous correlations between upstream and downstream sensors. We then evaluate our model on a real-world highway traffic volume dataset and compare it with several benchmark models. It is demonstrated that the proposed model achieves high estimation accuracy even under 20% sensor coverage rate and outperforms other baselines significantly, especially on underdetermined and non-equilibrium flow locations. Furthermore, comprehensive quantitative model analysis are also carried out to justify the model designs.
Truncated tensor Schatten p-norm based approach for spatiotemporal traffic data imputation with complicated missing patterns
May 19, 2022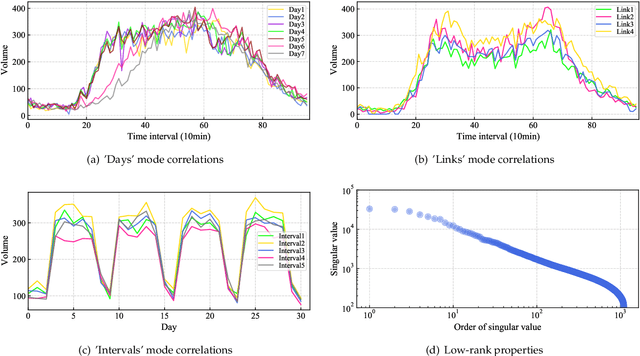



Rapid advances in sensor, wireless communication, cloud computing and data science have brought unprecedented amount of data to assist transportation engineers and researchers in making better decisions. However, traffic data in reality often has corrupted or incomplete values due to detector and communication malfunctions. Data imputation is thus required to ensure the effectiveness of downstream data-driven applications. To this end, numerous tensor-based methods treating the imputation problem as the low-rank tensor completion (LRTC) have been attempted in previous works. To tackle rank minimization, which is at the core of the LRTC, most of aforementioned methods utilize the tensor nuclear norm (NN) as a convex surrogate for the minimization. However, the over-relaxation issue in NN refrains it from desirable performance in practice. In this paper, we define an innovative nonconvex truncated Schatten p-norm for tensors (TSpN) to approximate tensor rank and impute missing spatiotemporal traffic data under the LRTC framework. We model traffic data into a third-order tensor structure of (time intervals,locations (sensors),days) and introduce four complicated missing patterns, including random missing and three fiber-like missing cases according to the tensor mode-n fibers. Despite nonconvexity of the objective function in our model, we derive the global optimal solutions by integrating the alternating direction method of multipliers (ADMM) with generalized soft-thresholding (GST). In addition, we design a truncation rate decay strategy to deal with varying missing rate scenarios. Comprehensive experiments are finally conducted using real-world spatiotemporal datasets, which demonstrate that the proposed LRTC-TSpN method performs well under various missing cases, meanwhile outperforming other SOTA tensor-based imputation models in almost all scenarios.