 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncorporating graph neural network into route choice model
Mar 04, 2025Route choice models are one of the most important foundations for transportation research. Traditionally, theory-based models have been utilized for their great interpretability, such as logit models and Recursive logit models. More recently, machine learning approaches have gained attentions for their better prediction accuracy. In this study, we propose novel hybrid models that integrate the Recursive logit model with Graph Neural Networks (GNNs) to enhance both predictive performance and model interpretability. To the authors' knowldedge, GNNs have not been utilized for route choice modeling, despite their proven effectiveness in capturing road network features and their widespread use in other transportation research areas. We mathematically show that our use of GNN is not only beneficial for enhancing the prediction performance, but also relaxing the Independence of Irrelevant Alternatives property without relying on strong assumptions. This is due to the fact that a specific type of GNN can efficiently capture multiple cross-effect patterns on networks from data. By applying the proposed models to one-day travel trajectory data in Tokyo, we confirmed their higher prediction accuracy compared to the existing models.
A Macro-Micro Approach to Reconstructing Vehicle Trajectories on Multi-Lane Freeways with Lane Changing
Jun 09, 2023



Vehicle trajectories can offer the most precise and detailed depiction of traffic flow and serve as a critical component in traffic management and control applications. Various technologies have been applied to reconstruct vehicle trajectories from sparse fixed and mobile detection data. However, existing methods predominantly concentrate on single-lane scenarios and neglect lane-changing (LC) behaviors that occur across multiple lanes, which limit their applicability in practical traffic systems. To address this research gap, we propose a macro-micro approach for reconstructing complete vehicle trajectories on multi-lane freeways, wherein the macro traffic state information and micro driving models are integrated to overcome the restrictions imposed by lane boundary. Particularly, the macroscopic velocity contour maps are established for each lane to regulate the movement of vehicle platoons, meanwhile the velocity difference between adjacent lanes provide valuable criteria for guiding LC behaviors. Simultaneously, the car-following models are extended from micro perspective to supply lane-based candidate trajectories and define the plausible range for LC positions. Later, a two-stage trajectory fusion algorithm is proposed to jointly infer both the car-following and LC behaviors, in which the optimal LC positions is identified and candidate trajectories are adjusted according to their weights. The proposed framework was evaluated using NGSIM dataset, and the results indicated a remarkable enhancement in both the accuracy and smoothness of reconstructed trajectories, with performance indicators reduced by over 30% compared to two representative reconstruction methods. Furthermore, the reconstruction process effectively reproduced LC behaviors across contiguous lanes, adding to the framework's comprehensiveness and realism.
Dynamic network congestion pricing based on deep reinforcement learning
Jun 24, 2022
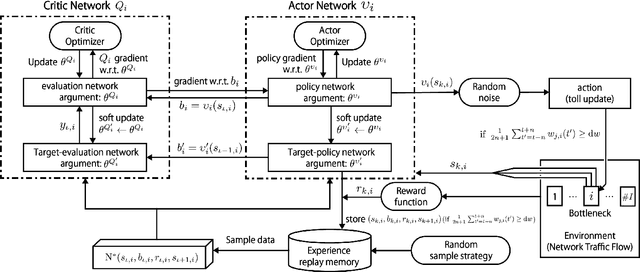
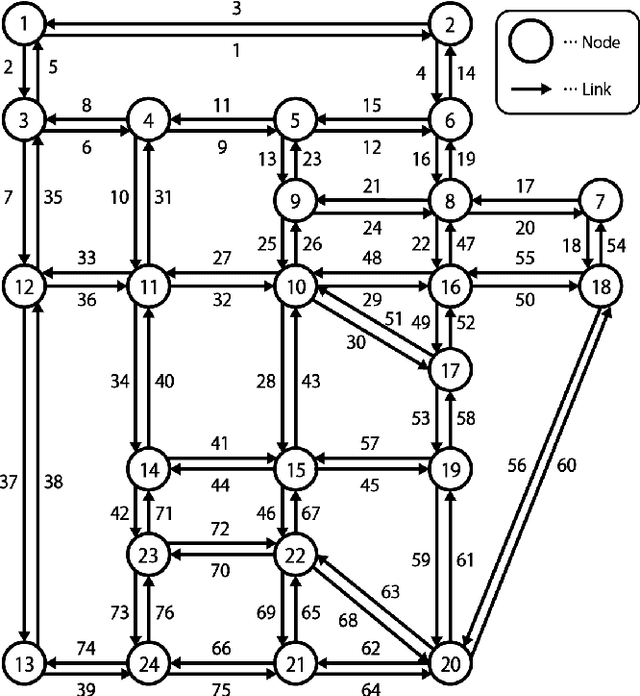
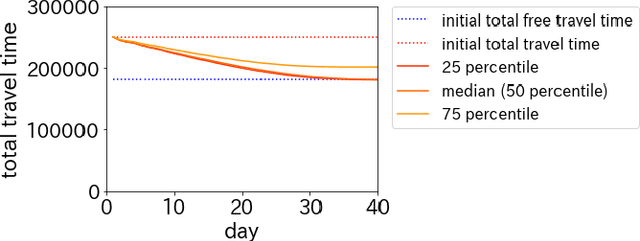
Traffic congestion is a serious problem in urban areas. Dynamic congestion pricing is one of the useful schemes to eliminate traffic congestion in strategic scale. However, in the reality, an optimal dynamic congestion pricing is very difficult or impossible to determine theoretically, because road networks are usually large and complicated, and behavior of road users is uncertain. To account for this challenge, this work proposes a dynamic congestion pricing method using deep reinforcement learning (DRL). It is designed to eliminate traffic congestion based on observable data in general large-scale road networks, by leveraging the data-driven nature of deep reinforcement learning. One of the novel elements of the proposed method is the distributed and cooperative learning scheme. Specifically, the DRL is implemented by a spatial-temporally distributed manner, and cooperation among DRL agents is established by novel techniques we call spatially shared reward and temporally switching learning. It enables fast and computationally efficient learning in large-scale networks. The numerical experiments using Sioux Falls Network showed that the proposed method works well thanks to the novel learning scheme.