 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge6D Pose Estimation on Point Cloud Data through Prior Knowledge Integration: A Case Study in Autonomous Disassembly
May 30, 2025The accurate estimation of 6D pose remains a challenging task within the computer vision domain, even when utilizing 3D point cloud data. Conversely, in the manufacturing domain, instances arise where leveraging prior knowledge can yield advancements in this endeavor. This study focuses on the disassembly of starter motors to augment the engineering of product life cycles. A pivotal objective in this context involves the identification and 6D pose estimation of bolts affixed to the motors, facilitating automated disassembly within the manufacturing workflow. Complicating matters, the presence of occlusions and the limitations of single-view data acquisition, notably when motors are placed in a clamping system, obscure certain portions and render some bolts imperceptible. Consequently, the development of a comprehensive pipeline capable of acquiring complete bolt information is imperative to avoid oversight in bolt detection. In this paper, employing the task of bolt detection within the scope of our project as a pertinent use case, we introduce a meticulously devised pipeline. This multi-stage pipeline effectively captures the 6D information with regard to all bolts on the motor, thereby showcasing the effective utilization of prior knowledge in handling this challenging task. The proposed methodology not only contributes to the field of 6D pose estimation but also underscores the viability of integrating domain-specific insights to tackle complex problems in manufacturing and automation.
Human-AI Interaction in Industrial Robotics: Design and Empirical Evaluation of a User Interface for Explainable AI-Based Robot Program Optimization
Apr 30, 2024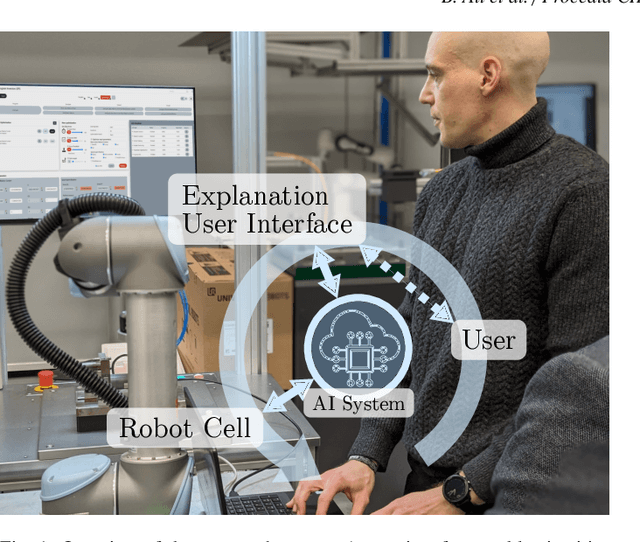
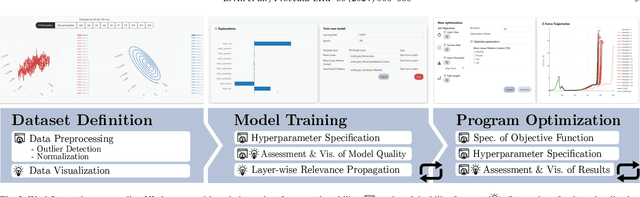

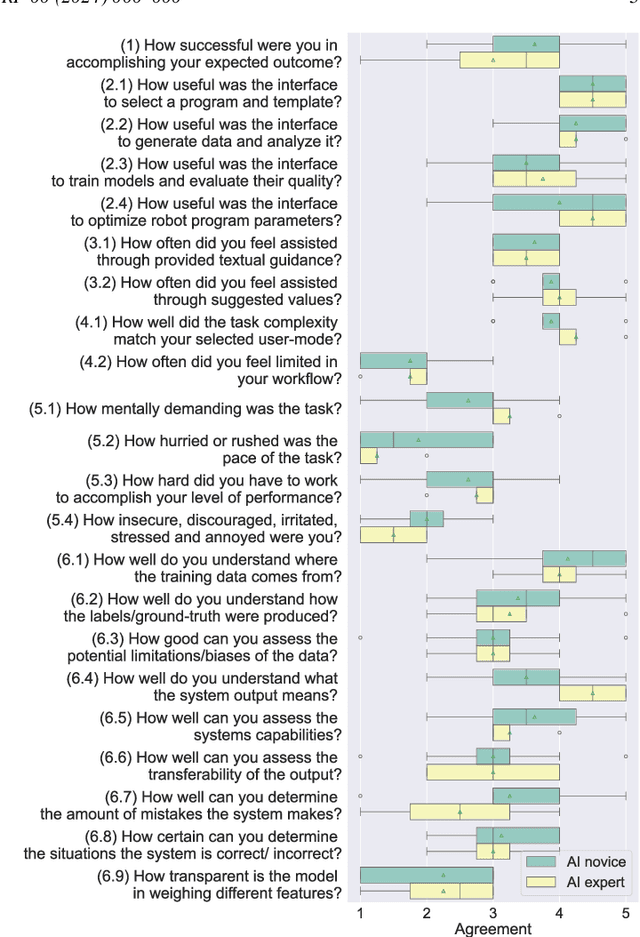
While recent advances in deep learning have demonstrated its transformative potential, its adoption for real-world manufacturing applications remains limited. We present an Explanation User Interface (XUI) for a state-of-the-art deep learning-based robot program optimizer which provides both naive and expert users with different user experiences depending on their skill level, as well as Explainable AI (XAI) features to facilitate the application of deep learning methods in real-world applications. To evaluate the impact of the XUI on task performance, user satisfaction and cognitive load, we present the results of a preliminary user survey and propose a study design for a large-scale follow-up study.
BANSAI: Towards Bridging the AI Adoption Gap in Industrial Robotics with Neurosymbolic Programming
Apr 21, 2024


Over the past decade, deep learning helped solve manipulation problems across all domains of robotics. At the same time, industrial robots continue to be programmed overwhelmingly using traditional program representations and interfaces. This paper undertakes an analysis of this "AI adoption gap" from an industry practitioner's perspective. In response, we propose the BANSAI approach (Bridging the AI Adoption Gap via Neurosymbolic AI). It systematically leverages principles of neurosymbolic AI to establish data-driven, subsymbolic program synthesis and optimization in modern industrial robot programming workflow. BANSAI conceptually unites several lines of prior research and proposes a path toward practical, real-world validation.
MotorFactory: A Blender Add-on for Large Dataset Generation of Small Electric Motors
Jan 11, 2023



To enable automatic disassembly of different product types with uncertain conditions and degrees of wear in remanufacturing, agile production systems that can adapt dynamically to changing requirements are needed. Machine learning algorithms can be employed due to their generalization capabilities of learning from various types and variants of products. However, in reality, datasets with a diversity of samples that can be used to train models are difficult to obtain in the initial period. This may cause bad performances when the system tries to adapt to new unseen input data in the future. In order to generate large datasets for different learning purposes, in our project, we present a Blender add-on named MotorFactory to generate customized mesh models of various motor instances. MotorFactory allows to create mesh models which, complemented with additional add-ons, can be further used to create synthetic RGB images, depth images, normal images, segmentation ground truth masks, and 3D point cloud datasets with point-wise semantic labels. The created synthetic datasets may be used for various tasks including motor type classification, object detection for decentralized material transfer tasks, part segmentation for disassembly and handling tasks, or even reinforcement learning-based robotics control or view-planning.