 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling prospective memory and resilient situated communications via Wizard of Oz
Nov 09, 2023This abstract presents a scenario for human-robot action in a home setting involving an older adult and a robot. The scenario is designed to explore the envisioned modelling of memory for communication with a socially assistive robots (SAR). The scenario will enable the gathering of data on failures of speech technology and human-robot communication involving shared memory that may occur during daily activities such as a music-listening activity.
Towards an Adaptive Robot for Sports and Rehabilitation Coaching
Sep 13, 2019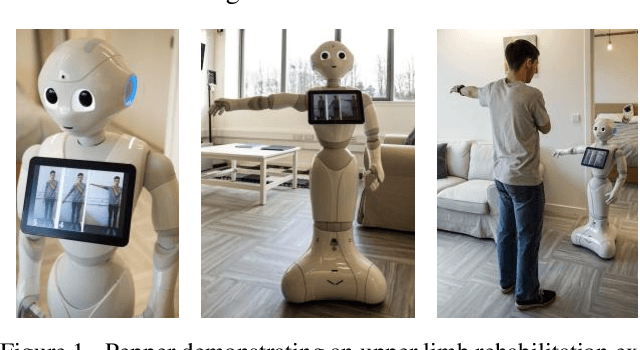
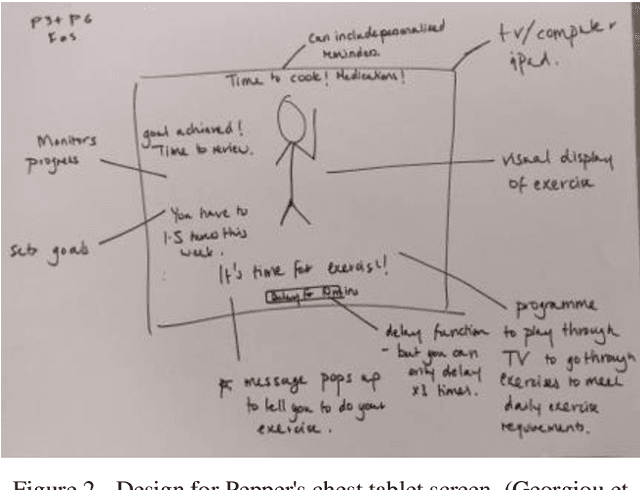

The work presented in this paper aims to explore how, and to what extent, an adaptive robotic coach has the potential to provide extra motivation to adhere to long-term rehabilitation and help fill the coaching gap which occurs during repetitive solo practice in high performance sport. Adapting the behavior of a social robot to a specific user, using reinforcement learning (RL), could be a way of increasing adherence to an exercise routine in both domains. The requirements gathering phase is underway and is presented in this paper along with the rationale of using RL in this context.
Experiential AI
Aug 06, 2019
Experiential AI is proposed as a new research agenda in which artists and scientists come together to dispel the mystery of algorithms and make their mechanisms vividly apparent. It addresses the challenge of finding novel ways of opening up the field of artificial intelligence to greater transparency and collaboration between human and machine. The hypothesis is that art can mediate between computer code and human comprehension to overcome the limitations of explanations in and for AI systems. Artists can make the boundaries of systems visible and offer novel ways to make the reasoning of AI transparent and decipherable. Beyond this, artistic practice can explore new configurations of humans and algorithms, mapping the terrain of inter-agencies between people and machines. This helps to viscerally understand the complex causal chains in environments with AI components, including questions about what data to collect or who to collect it about, how the algorithms are chosen, commissioned and configured or how humans are conditioned by their participation in algorithmic processes.
Learning and Generalisation of Primitives Skills Towards Robust Dual-arm Manipulation
Apr 02, 2019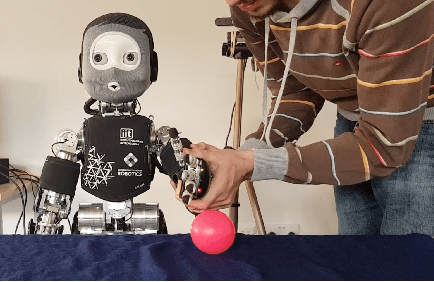
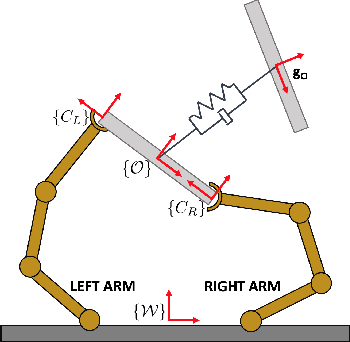
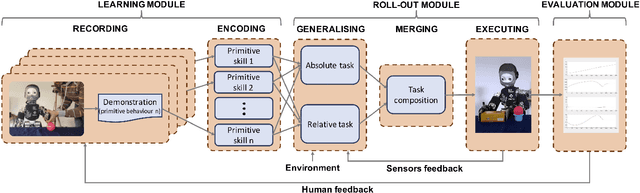
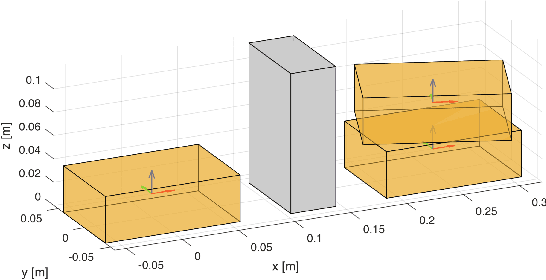
Robots are becoming a vital ingredient in society. Some of their daily tasks require dual-arm manipulation skills in the rapidly changing, dynamic and unpredictable real-world environments where they have to operate. Given the expertise of humans in conducting these activities, it is natural to study humans' motions to use the resulting knowledge in robotic control. With this in mind, this work leverages human knowledge to formulate a more general, real-time, and less task-specific framework for dual-arm manipulation. The proposed framework is evaluated on the iCub humanoid robot and several synthetic experiments, by conducting a dual-arm pick-and-place task of a parcel in the presence of unexpected obstacles. Results suggest the suitability of the method towards robust and generalisable dual-arm manipulation.
Interaction Histories and Short Term Memory: Enactive Development of Turn-taking Behaviors in a Childlike Humanoid Robot
Feb 25, 2012

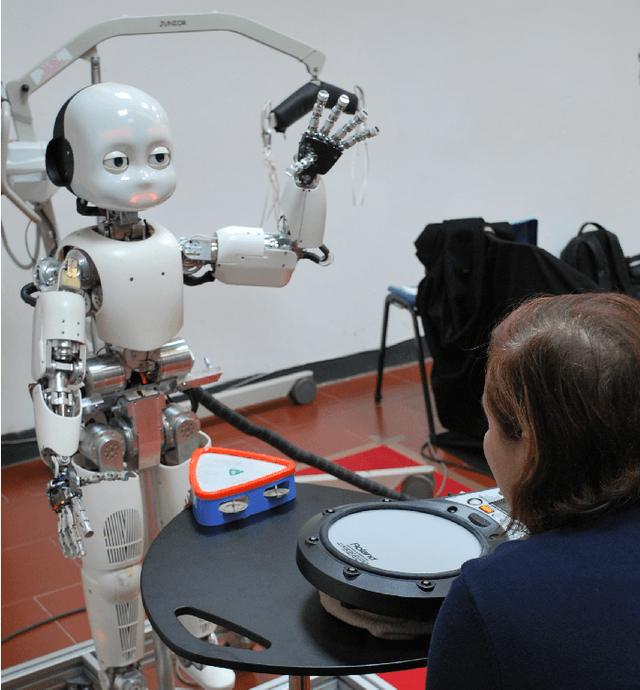
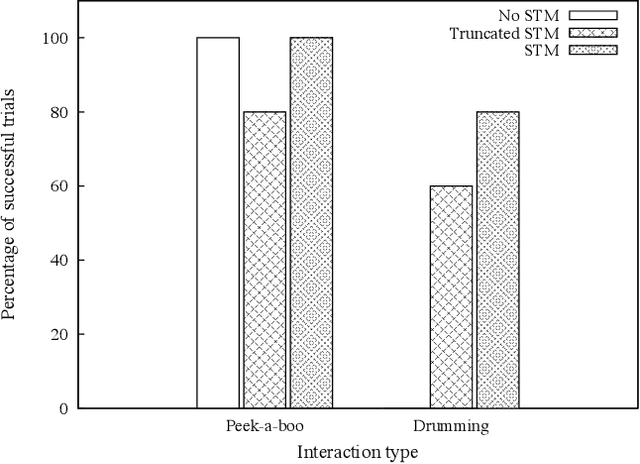
In this article, an enactive architecture is described that allows a humanoid robot to learn to compose simple actions into turn-taking behaviors while playing interaction games with a human partner. The robot's action choices are reinforced by social feedback from the human in the form of visual attention and measures of behavioral synchronization. We demonstrate that the system can acquire and switch between behaviors learned through interaction based on social feedback from the human partner. The role of reinforcement based on a short term memory of the interaction is experimentally investigated. Results indicate that feedback based only on the immediate state is insufficient to learn certain turn-taking behaviors. Therefore some history of the interaction must be considered in the acquisition of turn-taking, which can be efficiently handled through the use of short term memory.