 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Framework for Human-Robot Collaboration: Safety, Dynamic Ergonomics, and Adaptive Decision-Making
Mar 10, 2025The integration of collaborative robots into industrial environments has improved productivity, but has also highlighted significant challenges related to operator safety and ergonomics. This paper proposes an innovative framework that integrates advanced visual perception technologies, real-time ergonomic monitoring, and Behaviour Tree (BT)-based adaptive decision-making. Unlike traditional methods, which often operate in isolation or statically, our approach combines deep learning models (YOLO11 and SlowOnly), advanced tracking (Unscented Kalman Filter) and dynamic ergonomic assessments (OWAS), offering a modular, scalable and adaptive system. Experimental results show that the framework outperforms previous methods in several aspects: accuracy in detecting postures and actions, adaptivity in managing human-robot interactions, and ability to reduce ergonomic risk through timely robotic interventions. In particular, the visual perception module showed superiority over YOLOv9 and YOLOv8, while real-time ergonomic monitoring eliminated the limitations of static analysis. Adaptive role management, made possible by the Behaviour Tree, provided greater responsiveness than rule-based systems, making the framework suitable for complex industrial scenarios. Our system demonstrated a 92.5\% accuracy in grasping intention recognition and successfully classified ergonomic risks with real-time responsiveness (average latency of 0.57 seconds), enabling timely robotic
Detection of subclinical atherosclerosis by image-based deep learning on chest x-ray
Mar 27, 2024



Aims. To develop a deep-learning based system for recognition of subclinical atherosclerosis on a plain frontal chest x-ray. Methods and Results. A deep-learning algorithm to predict coronary artery calcium (CAC) score (the AI-CAC model) was developed on 460 chest x-ray (80% training cohort, 20% internal validation cohort) of primary prevention patients (58.4% male, median age 63 [51-74] years) with available paired chest x-ray and chest computed tomography (CT) indicated for any clinical reason and performed within 3 months. The CAC score calculated on chest CT was used as ground truth. The model was validated on an temporally-independent cohort of 90 patients from the same institution (external validation). The diagnostic accuracy of the AI-CAC model assessed by the area under the curve (AUC) was the primary outcome. Overall, median AI-CAC score was 35 (0-388) and 28.9% patients had no AI-CAC. AUC of the AI-CAC model to identify a CAC>0 was 0.90 in the internal validation cohort and 0.77 in the external validation cohort. Sensitivity was consistently above 92% in both cohorts. In the overall cohort (n=540), among patients with AI-CAC=0, a single ASCVD event occurred, after 4.3 years. Patients with AI-CAC>0 had significantly higher Kaplan Meier estimates for ASCVD events (13.5% vs. 3.4%, log-rank=0.013). Conclusion. The AI-CAC model seems to accurately detect subclinical atherosclerosis on chest x-ray with elevated sensitivity, and to predict ASCVD events with elevated negative predictive value. Adoption of the AI-CAC model to refine CV risk stratification or as an opportunistic screening tool requires prospective evaluation.
Sociable and Ergonomic Human-Robot Collaboration through Action Recognition and Augmented Hierarchical Quadratic Programming
Jul 07, 2022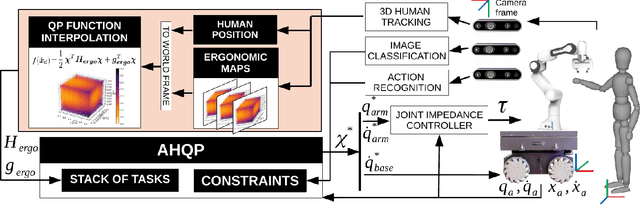
The recognition of actions performed by humans and the anticipation of their intentions are important enablers to yield sociable and successful collaboration in human-robot teams. Meanwhile, robots should have the capacity to deal with multiple objectives and constraints, arising from the collaborative task or the human. In this regard, we propose vision techniques to perform human action recognition and image classification, which are integrated into an Augmented Hierarchical Quadratic Programming (AHQP) scheme to hierarchically optimize the robot's reactive behavior and human ergonomics. The proposed framework allows one to intuitively command the robot in space while a task is being executed. The experiments confirm increased human ergonomics and usability, which are fundamental parameters for reducing musculoskeletal diseases and increasing trust in automation.
Learning Cooperative Dynamic Manipulation Skills from Human Demonstration Videos
Apr 08, 2022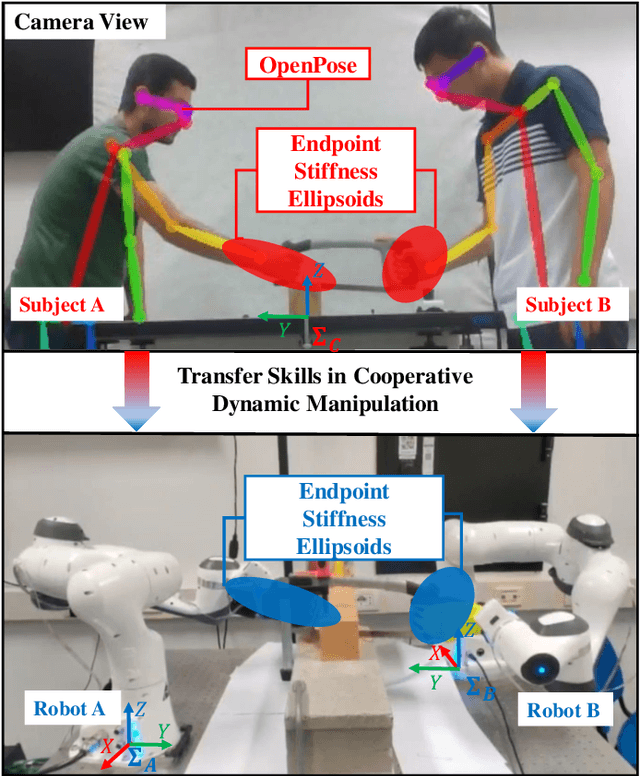
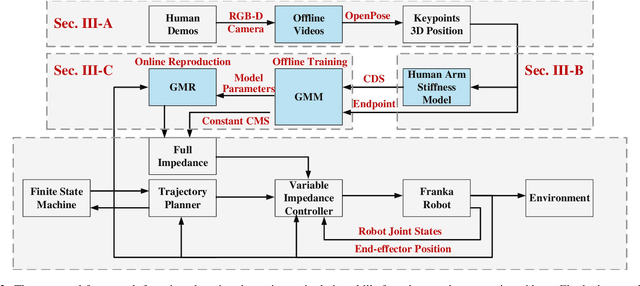
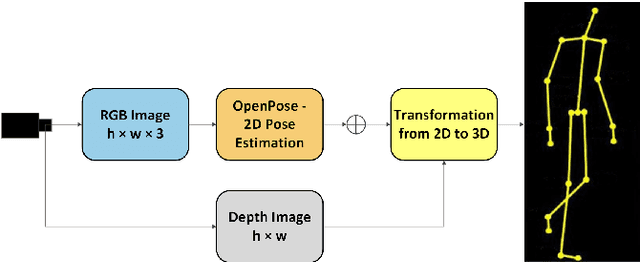
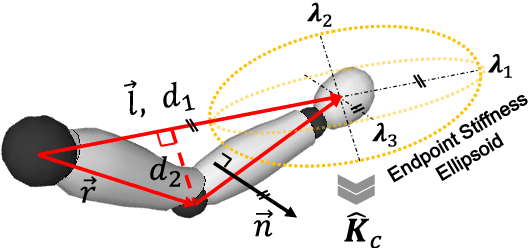
This article proposes a method for learning and robotic replication of dynamic collaborative tasks from offline videos. The objective is to extend the concept of learning from demonstration (LfD) to dynamic scenarios, benefiting from widely available or easily producible offline videos. To achieve this goal, we decode important dynamic information, such as the Configuration Dependent Stiffness (CDS), which reveals the contribution of arm pose to the arm endpoint stiffness, from a three-dimensional human skeleton model. Next, through encoding of the CDS via Gaussian Mixture Model (GMM) and decoding via Gaussian Mixture Regression (GMR), the robot's Cartesian impedance profile is estimated and replicated. We demonstrate the proposed method in a collaborative sawing task with leader-follower structure, considering environmental constraints and dynamic uncertainties. The experimental setup includes two Panda robots, which replicate the leader-follower roles and the impedance profiles extracted from a two-persons sawing video.