 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSociable and Ergonomic Human-Robot Collaboration through Action Recognition and Augmented Hierarchical Quadratic Programming
Paper and Code
Jul 07, 2022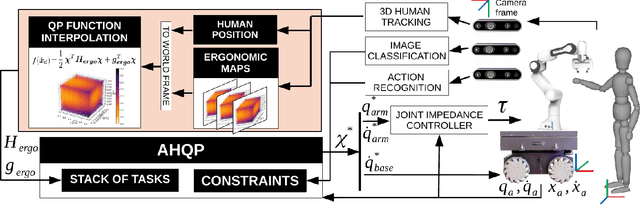
The recognition of actions performed by humans and the anticipation of their intentions are important enablers to yield sociable and successful collaboration in human-robot teams. Meanwhile, robots should have the capacity to deal with multiple objectives and constraints, arising from the collaborative task or the human. In this regard, we propose vision techniques to perform human action recognition and image classification, which are integrated into an Augmented Hierarchical Quadratic Programming (AHQP) scheme to hierarchically optimize the robot's reactive behavior and human ergonomics. The proposed framework allows one to intuitively command the robot in space while a task is being executed. The experiments confirm increased human ergonomics and usability, which are fundamental parameters for reducing musculoskeletal diseases and increasing trust in automation.