 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWILD: a new in-the-Wild Image Linkage Dataset for synthetic image attribution
Apr 29, 2025Synthetic image source attribution is an open challenge, with an increasing number of image generators being released yearly. The complexity and the sheer number of available generative techniques, as well as the scarcity of high-quality open source datasets of diverse nature for this task, make training and benchmarking synthetic image source attribution models very challenging. WILD is a new in-the-Wild Image Linkage Dataset designed to provide a powerful training and benchmarking tool for synthetic image attribution models. The dataset is built out of a closed set of 10 popular commercial generators, which constitutes the training base of attribution models, and an open set of 10 additional generators, simulating a real-world in-the-wild scenario. Each generator is represented by 1,000 images, for a total of 10,000 images in the closed set and 10,000 images in the open set. Half of the images are post-processed with a wide range of operators. WILD allows benchmarking attribution models in a wide range of tasks, including closed and open set identification and verification, and robust attribution with respect to post-processing and adversarial attacks. Models trained on WILD are expected to benefit from the challenging scenario represented by the dataset itself. Moreover, an assessment of seven baseline methodologies on closed and open set attribution is presented, including robustness tests with respect to post-processing.
Deepfake Media Forensics: State of the Art and Challenges Ahead
Aug 01, 2024AI-generated synthetic media, also called Deepfakes, have significantly influenced so many domains, from entertainment to cybersecurity. Generative Adversarial Networks (GANs) and Diffusion Models (DMs) are the main frameworks used to create Deepfakes, producing highly realistic yet fabricated content. While these technologies open up new creative possibilities, they also bring substantial ethical and security risks due to their potential misuse. The rise of such advanced media has led to the development of a cognitive bias known as Impostor Bias, where individuals doubt the authenticity of multimedia due to the awareness of AI's capabilities. As a result, Deepfake detection has become a vital area of research, focusing on identifying subtle inconsistencies and artifacts with machine learning techniques, especially Convolutional Neural Networks (CNNs). Research in forensic Deepfake technology encompasses five main areas: detection, attribution and recognition, passive authentication, detection in realistic scenarios, and active authentication. Each area tackles specific challenges, from tracing the origins of synthetic media and examining its inherent characteristics for authenticity. This paper reviews the primary algorithms that address these challenges, examining their advantages, limitations, and future prospects.
Energy-Efficient Inference on the Edge Exploiting TinyML Capabilities for UAVs
Nov 30, 2021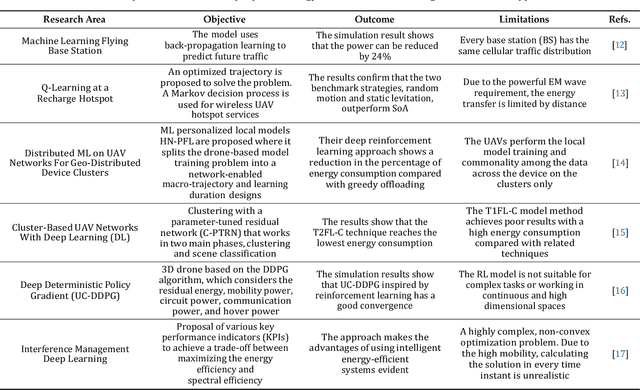
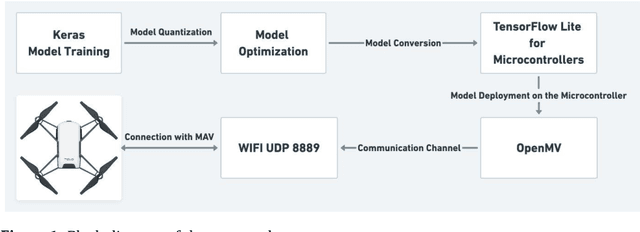
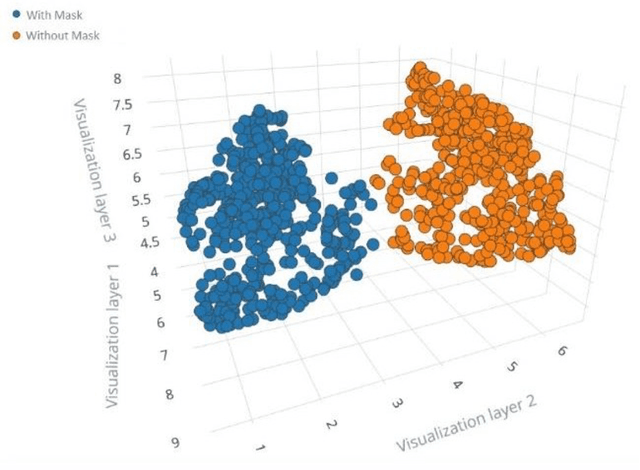
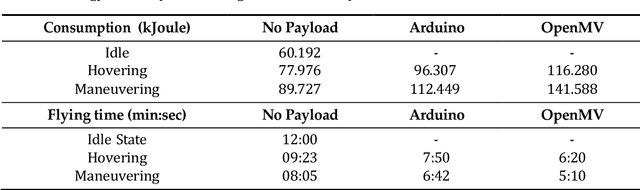
In recent years, the proliferation of unmanned aerial vehicles (UAVs) has increased dramatically. UAVs can accomplish complex or dangerous tasks in a reliable and cost-effective way but are still limited by power consumption problems, which pose serious constraints on the flight duration and completion of energy-demanding tasks. The possibility of providing UAVs with advanced decision-making capabilities in an energy-effective way would be extremely beneficial. In this paper, we propose a practical solution to this problem that exploits deep learning on the edge. The developed system integrates an OpenMV microcontroller into a DJI Tello Micro Aerial Vehicle (MAV). The microcontroller hosts a set of machine learning-enabled inference tools that cooperate to control the navigation of the drone and complete a given mission objective. The goal of this approach is to leverage the new opportunistic features of TinyML through OpenMV including offline inference, low latency, energy efficiency, and data security. The approach is successfully validated on a practical application consisting of the onboard detection of people wearing protection masks in a crowded environment.