 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChartFormer: A Large Vision Language Model for Converting Chart Images into Tactile Accessible SVGs
May 29, 2024Visualizations, such as charts, are crucial for interpreting complex data. However, they are often provided as raster images, which are not compatible with assistive technologies for people with blindness and visual impairments, such as embossed papers or tactile displays. At the same time, creating accessible vector graphics requires a skilled sighted person and is time-intensive. In this work, we leverage advancements in the field of chart analysis to generate tactile charts in an end-to-end manner. Our three key contributions are as follows: (1) introducing the ChartFormer model trained to convert raster chart images into tactile-accessible SVGs, (2) training this model on the Chart2Tactile dataset, a synthetic chart dataset we created following accessibility standards, and (3) evaluating the effectiveness of our SVGs through a pilot user study with an refreshable two-dimensional tactile display. Our work is publicly available at https://github.com/nsothman/ChartFormer .
Calculate the Optimum Threshold for Double Energy Detection Technique in Cognitive Radio Networks (CRNs)
Apr 15, 2022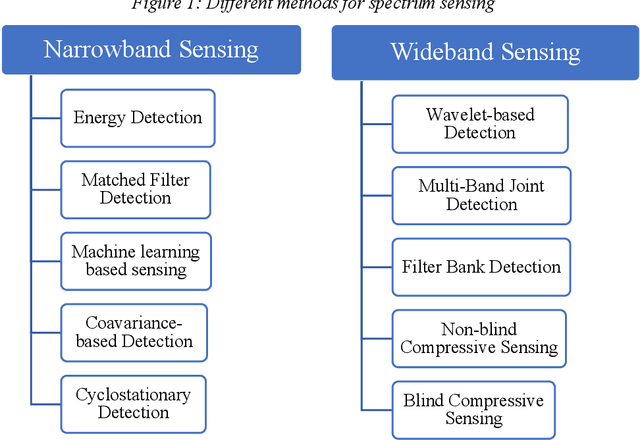
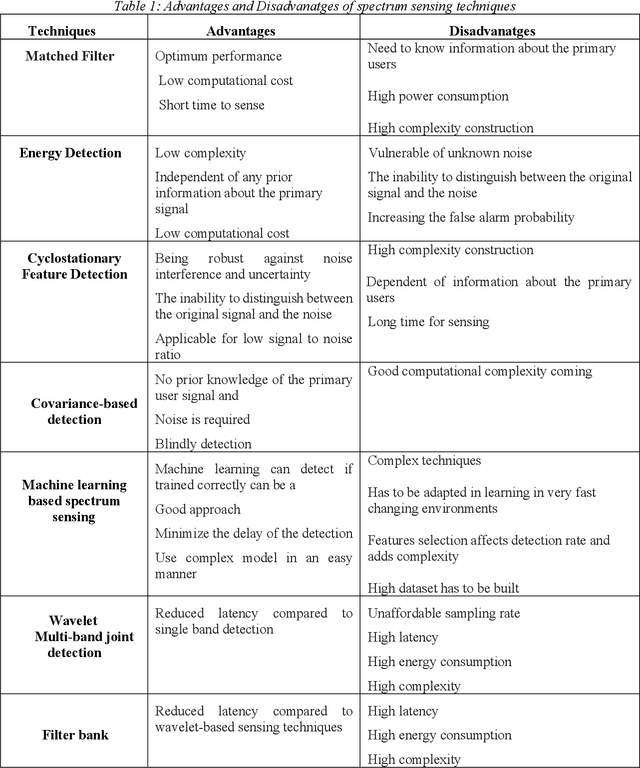

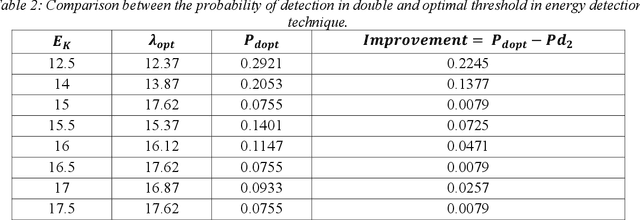
One of the most important technical challenges when designing a Cognitive Radio Networks (CRNs) is spectrum sensing, which has the responsibility of recognizing the presence or absence of the primary users in the frequency bands. A common technique used for spectrum sensing is double energy detection since it can operate without any prior information regarding the characteristics of the primary user signals. A double threshold energy detection algorithm is based on the use of two thresholds, to check the energy of the received signals and decided whether the spectrum is occupied or not. Furthermore, thresholds play a key role in the energy detection algorithm, by considering the stochastic features of noise in this model, as a result calculating the optimal threshold is a crucial task. In this paper, the Bi-Section algorithm was used to detect the optimum energy level in the fuzzy region which is an area between the low and high energy threshold. For this purpose, the decision threshold was determined by the use of the Bisection function for cognitive users. Numerical simulations show that the proposed method achieves better detection performance than the conventional double-threshold energy-sensing schemes. Moreover, the presented technique has advantages such as increasing the probability of detection of primary users and decreasing the probability of Collison between primary and secondary users.
TinyML Platforms Benchmarking
Nov 30, 2021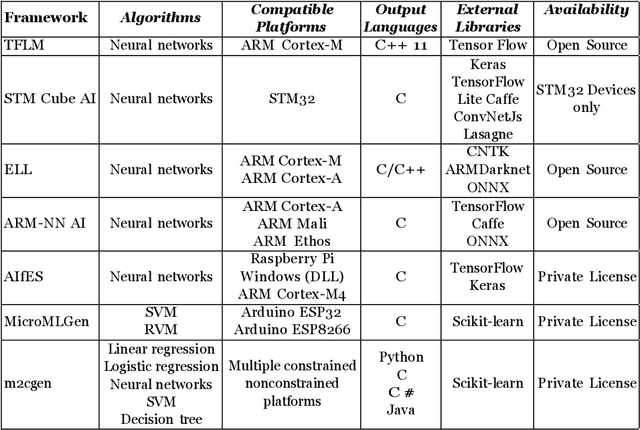

Recent advances in state-of-the-art ultra-low power embedded devices for machine learning (ML) have permitted a new class of products whose key features enable ML capabilities on microcontrollers with less than 1 mW power consumption (TinyML). TinyML provides a unique solution by aggregating and analyzing data at the edge on low-power embedded devices. However, we have only recently been able to run ML on microcontrollers, and the field is still in its infancy, which means that hardware, software, and research are changing extremely rapidly. Consequently, many TinyML frameworks have been developed for different platforms to facilitate the deployment of ML models and standardize the process. Therefore, in this paper, we focus on bench-marking two popular frameworks: Tensorflow Lite Micro (TFLM) on the Arduino Nano BLE and CUBE AI on the STM32-NucleoF401RE to provide a standardized framework selection criterion for specific applications.
Energy-Efficient Inference on the Edge Exploiting TinyML Capabilities for UAVs
Nov 30, 2021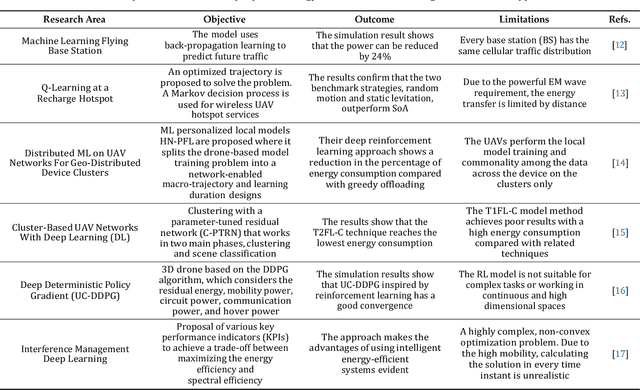
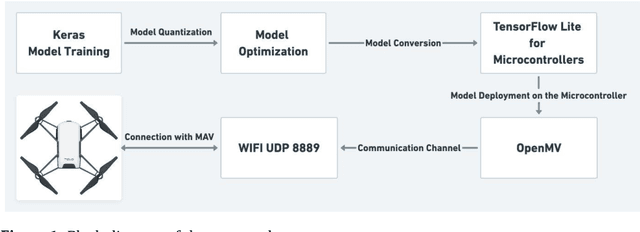
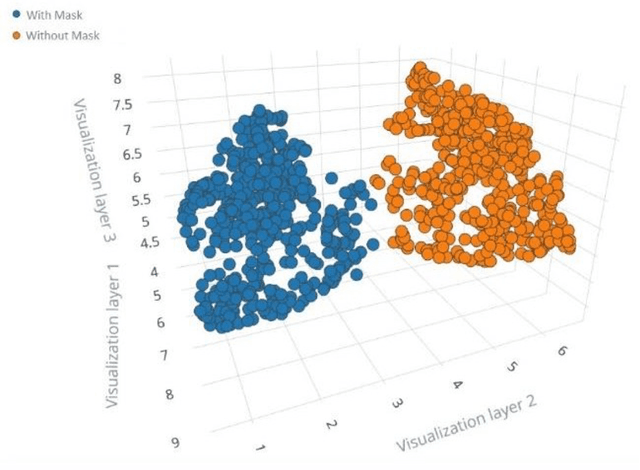
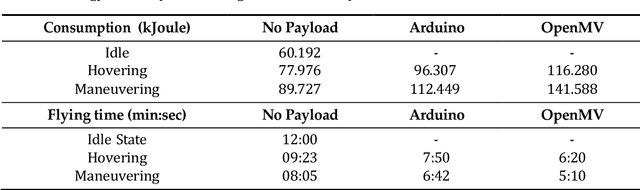
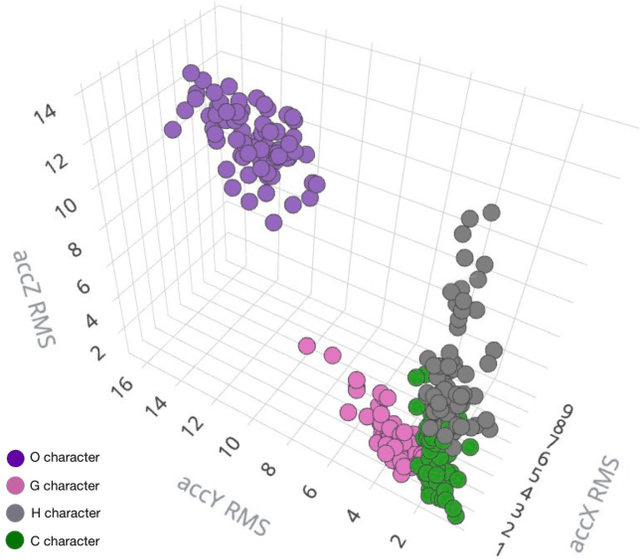
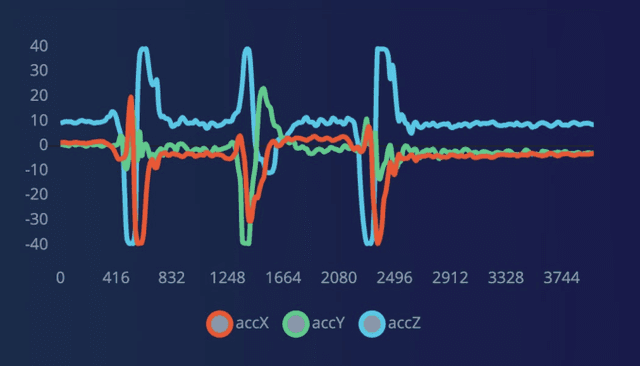
In recent years, the proliferation of unmanned aerial vehicles (UAVs) has increased dramatically. UAVs can accomplish complex or dangerous tasks in a reliable and cost-effective way but are still limited by power consumption problems, which pose serious constraints on the flight duration and completion of energy-demanding tasks. The possibility of providing UAVs with advanced decision-making capabilities in an energy-effective way would be extremely beneficial. In this paper, we propose a practical solution to this problem that exploits deep learning on the edge. The developed system integrates an OpenMV microcontroller into a DJI Tello Micro Aerial Vehicle (MAV). The microcontroller hosts a set of machine learning-enabled inference tools that cooperate to control the navigation of the drone and complete a given mission objective. The goal of this approach is to leverage the new opportunistic features of TinyML through OpenMV including offline inference, low latency, energy efficiency, and data security. The approach is successfully validated on a practical application consisting of the onboard detection of people wearing protection masks in a crowded environment.