 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking GNNs and Missing Features: Challenges, Evaluation and a Robust Solution
Jan 08, 2026Handling missing node features is a key challenge for deploying Graph Neural Networks (GNNs) in real-world domains such as healthcare and sensor networks. Existing studies mostly address relatively benign scenarios, namely benchmark datasets with (a) high-dimensional but sparse node features and (b) incomplete data generated under Missing Completely At Random (MCAR) mechanisms. For (a), we theoretically prove that high sparsity substantially limits the information loss caused by missingness, making all models appear robust and preventing a meaningful comparison of their performance. To overcome this limitation, we introduce one synthetic and three real-world datasets with dense, semantically meaningful features. For (b), we move beyond MCAR and design evaluation protocols with more realistic missingness mechanisms. Moreover, we provide a theoretical background to state explicit assumptions on the missingness process and analyze their implications for different methods. Building on this analysis, we propose GNNmim, a simple yet effective baseline for node classification with incomplete feature data. Experiments show that GNNmim is competitive with respect to specialized architectures across diverse datasets and missingness regimes.
A Self-Explainable Heterogeneous GNN for Relational Deep Learning
Nov 30, 2024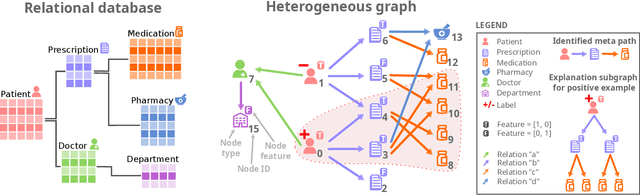



Recently, significant attention has been given to the idea of viewing relational databases as heterogeneous graphs, enabling the application of graph neural network (GNN) technology for predictive tasks. However, existing GNN methods struggle with the complexity of the heterogeneous graphs induced by databases with numerous tables and relations. Traditional approaches either consider all possible relational meta-paths, thus failing to scale with the number of relations, or rely on domain experts to identify relevant meta-paths. A recent solution does manage to learn informative meta-paths without expert supervision, but assumes that a node's class depends solely on the existence of a meta-path occurrence. In this work, we present a self-explainable heterogeneous GNN for relational data, that supports models in which class membership depends on aggregate information obtained from multiple occurrences of a meta-path. Experimental results show that in the context of relational databases, our approach effectively identifies informative meta-paths that faithfully capture the model's reasoning mechanisms. It significantly outperforms existing methods in both synthetic and real-world scenario.
Meta-Path Learning for Multi-relational Graph Neural Networks
Sep 29, 2023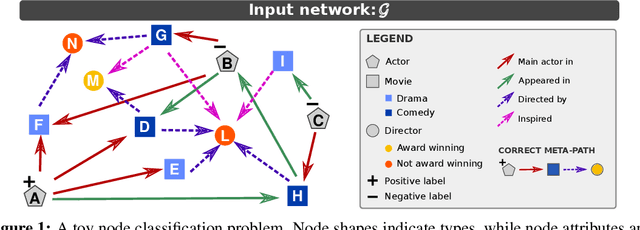


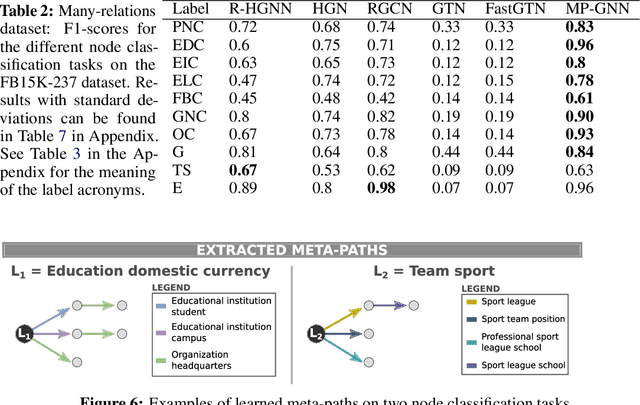
Existing multi-relational graph neural networks use one of two strategies for identifying informative relations: either they reduce this problem to low-level weight learning, or they rely on handcrafted chains of relational dependencies, called meta-paths. However, the former approach faces challenges in the presence of many relations (e.g., knowledge graphs), while the latter requires substantial domain expertise to identify relevant meta-paths. In this work we propose a novel approach to learn meta-paths and meta-path GNNs that are highly accurate based on a small number of informative meta-paths. Key element of our approach is a scoring function for measuring the potential informativeness of a relation in the incremental construction of the meta-path. Our experimental evaluation shows that the approach manages to correctly identify relevant meta-paths even with a large number of relations, and substantially outperforms existing multi-relational GNNs on synthetic and real-world experiments.
Energy-Efficient Inference on the Edge Exploiting TinyML Capabilities for UAVs
Nov 30, 2021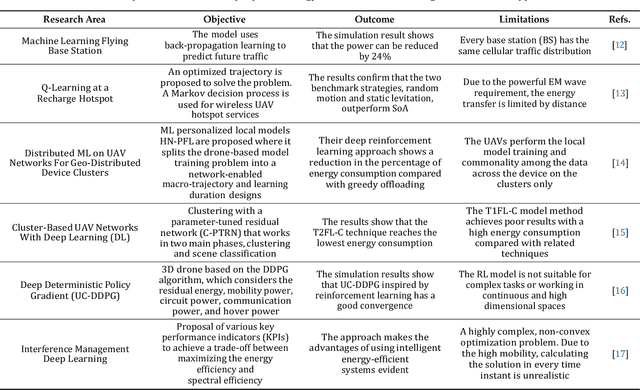
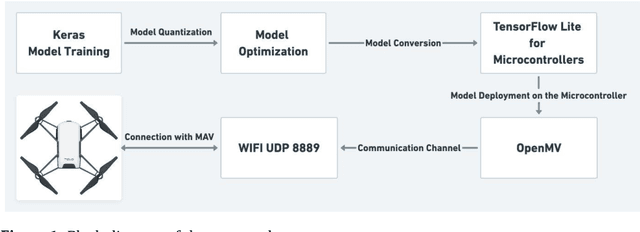
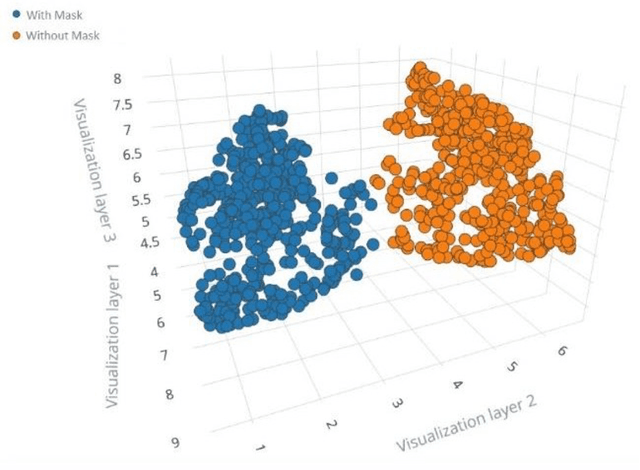
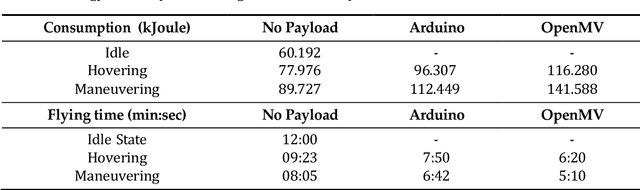
In recent years, the proliferation of unmanned aerial vehicles (UAVs) has increased dramatically. UAVs can accomplish complex or dangerous tasks in a reliable and cost-effective way but are still limited by power consumption problems, which pose serious constraints on the flight duration and completion of energy-demanding tasks. The possibility of providing UAVs with advanced decision-making capabilities in an energy-effective way would be extremely beneficial. In this paper, we propose a practical solution to this problem that exploits deep learning on the edge. The developed system integrates an OpenMV microcontroller into a DJI Tello Micro Aerial Vehicle (MAV). The microcontroller hosts a set of machine learning-enabled inference tools that cooperate to control the navigation of the drone and complete a given mission objective. The goal of this approach is to leverage the new opportunistic features of TinyML through OpenMV including offline inference, low latency, energy efficiency, and data security. The approach is successfully validated on a practical application consisting of the onboard detection of people wearing protection masks in a crowded environment.